EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】RoboDK监控CS机器人实时运动
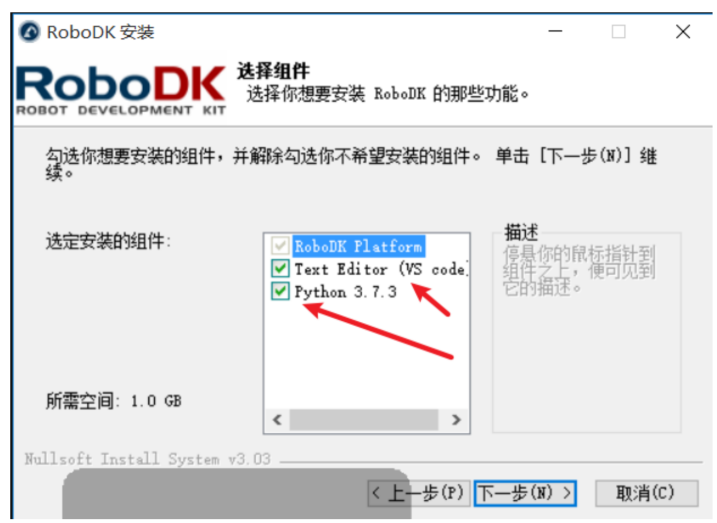
CS机器人现支持在RoboDK仿真中监控实时运动。操作只需以下几个步骤:1. 准备:PC需与机器人在同一网段下,使用FB1网口。2. 打开RoboDK,新建方案,点击左上角“打开”-导入与实际CS机器人型号一致的机器人模型-“打开”。导入…
分享
手机扫码分享
复制链接
0
1795
2.
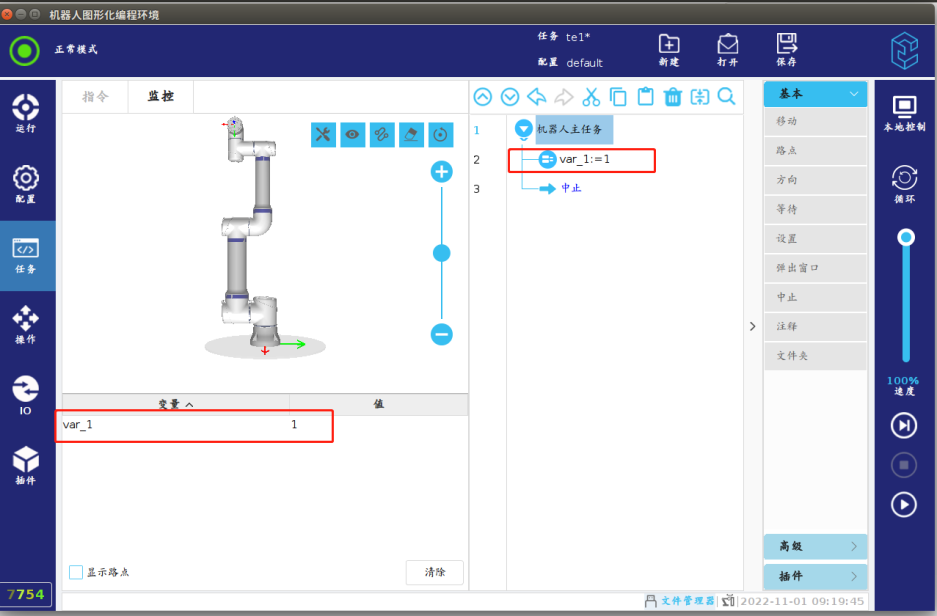
【论坛】CS示教器实时显示脚本中的变量数据
在CS机器人UI界面,可以创建变量,例如下图的var_1。运行时可以在 监控 画面 看到该变量的当前值。实质是机器人创建了global 变量var_1如果希望在示教器监控界面显示脚本中的变量数据,需要在脚本中创建global变量,并且后续对该变量赋值。此时运行程序,可以在示教器的监控界面看到该变量的当前值
分享
手机扫码分享
复制链接
0
1291
3.
【论坛】使用RoboDK 监控EC机器人的位置
RoboDK是一款应用于工业机器人仿真与离线编程的软件,艾利特EC系列机器人已经支持RoboDK的仿真和离线编程。以下文章将介绍如何使用Robodk实时监控真实机器人的位置。1. 驱动说明该驱动仅将机器人的实际关节信息反馈至robodk界…
分享
手机扫码分享
复制链接
0
2081
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件