
MOVE系列移动指令是EC机器人在3.4版本后推出的新指令。带有比MOV系列指令更多的参数。虽然使用起来不如MOV系列指令快捷,但是可以完成一些MOV指令无法完成的应用。
本文将介绍其中其中比较突出的应用之一:利用部分MOVE系列指令自带的绑定工具坐标系或用户坐标系参数实现各种程序快速直接套用的功能。比如切换工具号,让不同TCP的工具复刻同样轨迹,可用于夹爪型号更换的场景、多工具轮番作业的场景等。调整绑定的用户坐标系,在不同区域完成同样的轨迹,可用于多盘码垛、多盘打包等批量重复作业的场景。
注意:
程序的快速套用可以适配切换机器人的场景。在机器人A上设计好的程序转移到机器人B上,只要在机器人B上的更新用户坐标,即可立刻将该程序在机器人B上投入使用。机器人B与机器人A可为不同型号的同一系列机器人,但前提是程序里的点位都是机器人B可以触及的。
一个简单的实用例子为:某机器人作业车间中追加了一个需要上下料的数控装置,但这个装置的距离较远,因此该车间中的EC63机器人需要替换为臂展更长的EC66。只要原本EC63中,关键部分的移动指令均为MOVEL(或可以简单地修改为MOVEL),用户就能省下示教原有程序的位置点所需要的大量时间,只需要调整绑定的用户坐标系参数并追加新数控装置所需的程序即可。
具体示范:
(示范中使用的机器人A为EC63,机器人B为EC66)
1. 在机器人A上编辑好工具坐标和用户坐标。
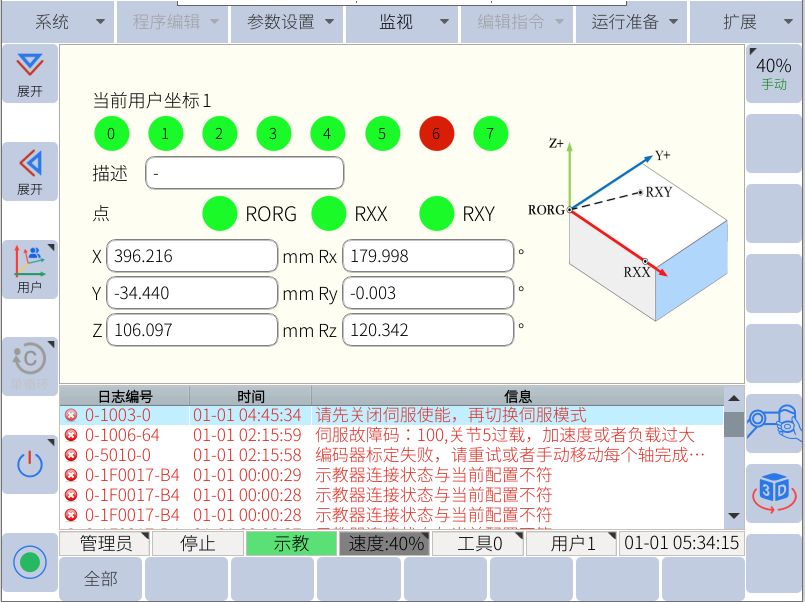
图1. 机器人A用户坐标1的设置
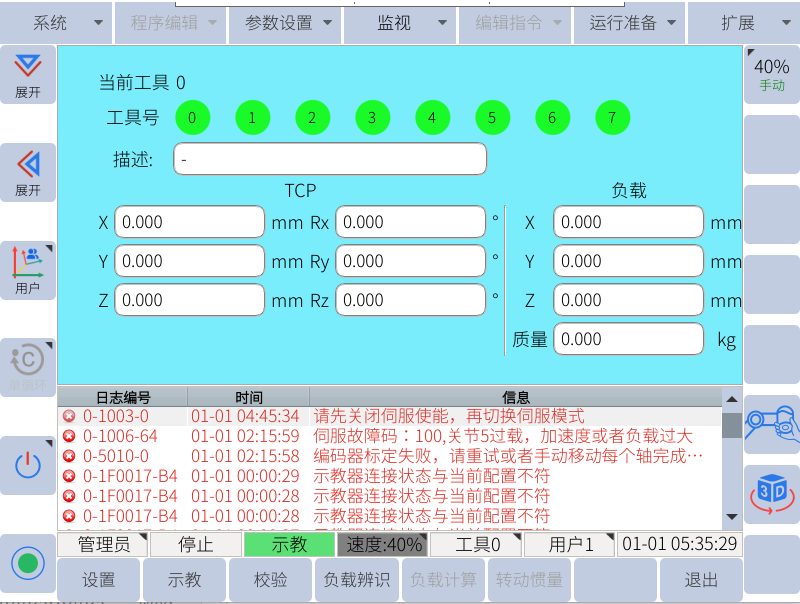
图2. 机器人A工具户坐标0的设置
2. 在机器人A上使用MOVE系列指令编辑运动。注意点位需要使用V种类变量。推荐使用ConstV,这样在之后转移程序时不需要复制变量。这些指令需要绑定工具坐标系和用户坐标系。注意点位不能使用ConstP,因为P坐标都是绝对坐标,不会因工具坐标系和用户坐标系的变化而变化。
NOP MOVEL ConstV=[13.4572936,64.5010677,-0.0027210,0.0078861,0.0000520,-2.3994709] V=200.0 CR=0.0MM ACC=50 DEC=50 USER#(1) REF=[-12.179,-57.905,100.426,-132.972,90.000,0.000] MOVEC ConstV=[89.5285196,101.5955984,0.0022078,0.0078655,0.0000483,-2.4052486] ConstV=[62.8384523,17.1893780,0.0071623,0.0078606,0.0000589,-2.4115739] V=200.0 CR=0.0MM ACC=50 DEC=50 USER#(1) REF=[-11.486,-68.343,117.973,-140.079,90.000,-0.001] MOVEL ConstV=[58.8814184,64.8581670,-0.0008410,0.0079104,0.0000527,-2.4821567] V=200.0 CR=0.0MM ACC=50 DEC=50 USER#(1) REF=[-7.441,-61.129,106.016,-135.340,90.000,0.000] MOVEL ConstV=[13.4552266,64.4998623,-0.0048271,0.0078995,0.0000519,-2.3994588] V=200.0 CR=0.0MM ACC=50 DEC=50 USER#(1) REF=[-12.179,-57.905,100.426,-132.973,90.000,0.000] END
代码1. 机器人A的程序
3. 将编辑好的程序备份到U盘,然后在机器人B上加载该程序。在机器人B上设置好工具坐标系和用户坐标系,推荐使用和程序中同样编号的坐标系。如果使用不同编号的坐标系,则需要将程序中绑定的坐标号更新。

图3. 机器人B用户坐标2的设置
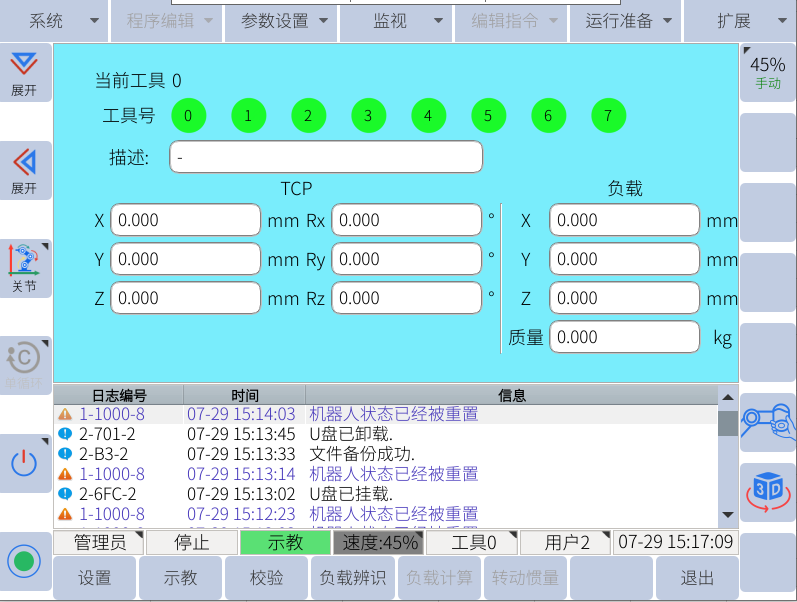
图4. 机器人B工具户坐标0的设置
NOP MOVEL ConstV=[13.4572936,64.5010677,-0.0027210,0.0078861,0.0000520,-2.3994709] V=200.0 CR=0.0MM ACC=50 DEC=50 USER#(2) REF=[-12.179,-57.905,100.426,-132.972,90.000,0.000] MOVEC ConstV=[89.5285196,101.5955984,0.0022078,0.0078655,0.0000483,-2.4052486] ConstV=[62.8384523,17.1893780,0.0071623,0.0078606,0.0000589,-2.4115739] V=200.0 CR=0.0MM ACC=50 DEC=50 USER#(2) REF=[-11.486,-68.343,117.973,-140.079,90.000,-0.001] MOVEL ConstV=[58.8814184,64.8581670,-0.0008410,0.0079104,0.0000527,-2.4821567] V=200.0 CR=0.0MM ACC=50 DEC=50 USER#(2) REF=[-7.441,-61.129,106.016,-135.340,90.000,0.000] MOVEL ConstV=[13.4552266,64.4998623,-0.0048271,0.0078995,0.0000519,-2.3994588] V=200.0 CR=0.0MM ACC=50 DEC=50 USER#(2) REF=[-12.179,-57.905,100.426,-132.973,90.000,0.000] END
代码2. 机器人B的程序(仅修改了用户坐标号)
4. 简单测试一下是否有误差,如果存在误差,请对坐标系进行修正。






