EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】CS脚本计算用户坐标系及对准功能
用户可以使用以下代码,计算坐标系,p1为原点,p1p2为x方向,p1p2p3构成xy平面# author: chenliao@elibot.cnimport math def dot_product(v1, v2): return sum(a*b for a, b in zip(v1, v2)) def cross_product(v1, v2): return [v1[1]*v2[2] - v1[2]*v2[1], …
分享
手机扫码分享
复制链接
0
1383
2.
【论坛】如何使用JBI,使机器人末端绕着固定坐标系旋转
绕着固定点旋转(基于TCP方向或者base或者用户坐标系方向),需注意,V变量需跟随工具坐标变化而变化,如果想得到比较好的旋转效果,需正确的设置TCP位置,并更新当前TCP的记录点(V10).附代码:NOP // 基于当前TCP记录开始…
分享
手机扫码分享
复制链接
0
851
3.
【论坛】保存所有工具数据和用户坐标系数据到JBI文件
机器人的工具和用户坐标系数据实时保存到机器人控制器。为避免误修改,可以使用以下lua代码,将所有tool和user数据保存到jbi。用户在使用时,可以在初始化时加载该jbi并初始化tool和user数据-- Author: chenliao@elibot.cn -- May.5, 2023 fu…
分享
手机扫码分享
复制链接
0
981
4.
【论坛】CS中基于用户坐标系偏移的脚本
CS未直接提供基于用户坐标系的偏移可以使用以下代码,配合上图的图形化编程,实现基于 坐标系1的x方向0.2m的偏移。 在图形化界面中,记录的例如上图的路点_1均为基于base坐标系def Offs(p,x,y,z,user=[0,0,0,0,0,0]): # 传入的p是基…
分享
手机扫码分享
复制链接
0
1452
5.
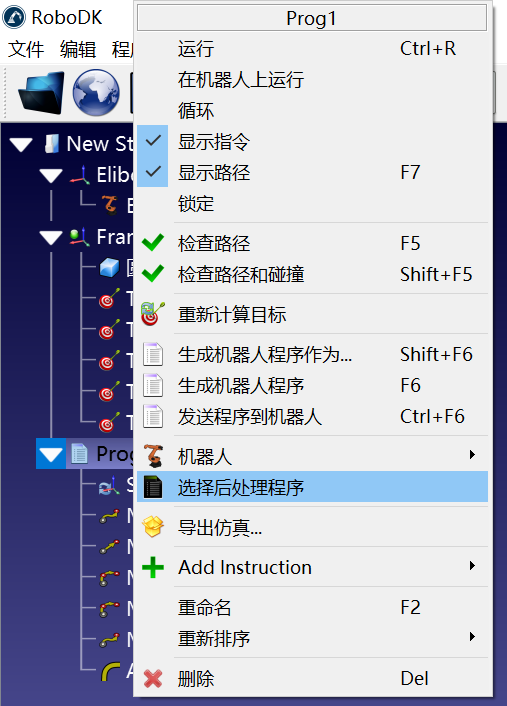
【论坛】使用RoboDK生成CS机器人轨迹.script和.task
目录1. 生成*.script2. 生成*.task 基坐标系下 用户坐标系下1. 生成*.script1. 将Elibot_CS_V1.py 放到robodk安装目录的Posts文件夹下,默认路径为C:\RoboDK\Posts2. 在robodk中,导入与真机一致的CS模型,编辑程序完成后右键点击程序,选择…
分享
手机扫码分享
复制链接
0
1887
6.
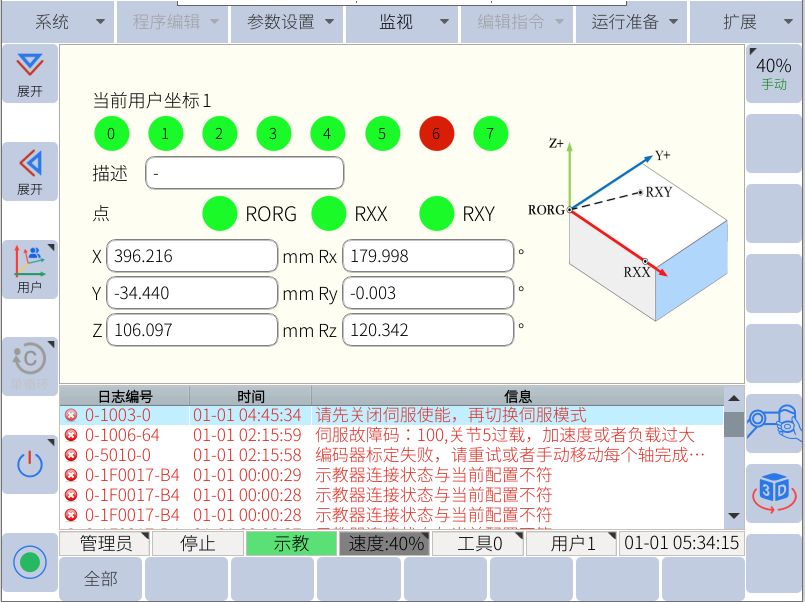
【论坛】EC机器人支持手动模式自动对齐功能
机器人软件升级到v3.6后,点击示教器的3d试图按钮(如下图),并伺服上电,会出现“对齐基座”和“对齐用户”按钮。此时,点击对应按钮,机器人会将当前工具tcp的z方向自动垂直与基座xy平面或者用户坐标系的xy平面对齐后效果如下图。方便用户调试
分享
手机扫码分享
复制链接
0
1599
7.
【论坛】MOVE系列指令:绑定工具坐标、用户坐标的妙用
MOVE系列移动指令是EC机器人在3.4版本后推出的新指令。带有比MOV系列指令更多的参数。虽然使用起来不如MOV系列指令快捷,但是可以完成一些MOV指令无法完成的应用。本文将介绍其中其中比较突出的应用之一:利用部分MOVE系列…
分享
手机扫码分享
复制链接
0
2387
8.
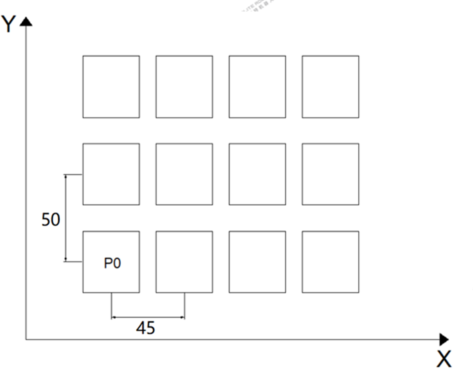
【论坛】艾利特机器人码垛程序怎么写?
比如我有一个产品4x4矩阵阵列,行间距50mm,列间距45mm,从P0点抓取,示教了一个用户坐标系1,依x方向抓取。抓完之后抬起高度是200mm(准备点,离开点)
分享
手机扫码分享
复制链接
1
1795
9.
【论坛】机械臂控制需求——校正算法的一些问题。
校正算法是基于空间中的一个平面进行校正,因此会需要手臂设定一个用户坐标系,使其Z方向与平面的法矢量一致。假设使用原始坐标系的情况底下,工作平面就必须如图一。假设需要在其他地方进行手臂校正,则需要设定一…
分享
手机扫码分享
复制链接
1
1107
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件