EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
EC机器人支持不同姿态安装,包括侧装,倒装等。
不同的安装方式,对机器人带来的重力影响不同。
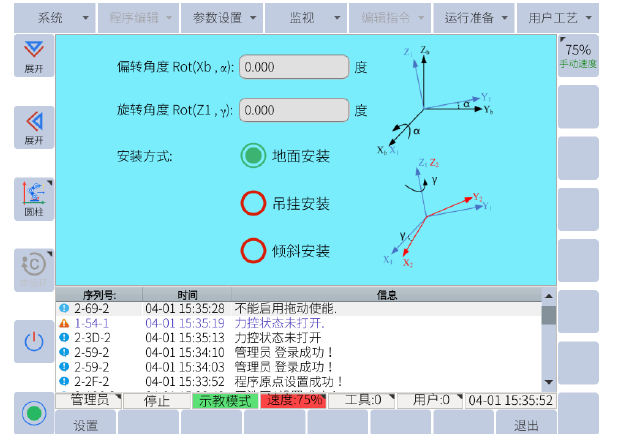
现场机器人在确定安装方式后,需要在示教器的 -- 运行准备-- 安装设置中输入以下参数。
先根据右手定则绕此时机器人基坐标系X轴进行旋转,使得新产生坐标系W1的XY平面与安装面平行,旋转的角度即为偏转角Rot(Xb,α);再绕坐标系W1的Z轴进行旋转使旋转后的新产生的坐标系与安装姿态相符,旋转的角度即为旋转角度Rot(Z1,γ);关于常见不同姿态安装数据,可以参考下图输入。