
艾利特EC机器人从V3.5开始正式支持EthernetIP通讯(机器人作为adapter从站)。无需对机器人进行特殊设置,无需设置安装选项。
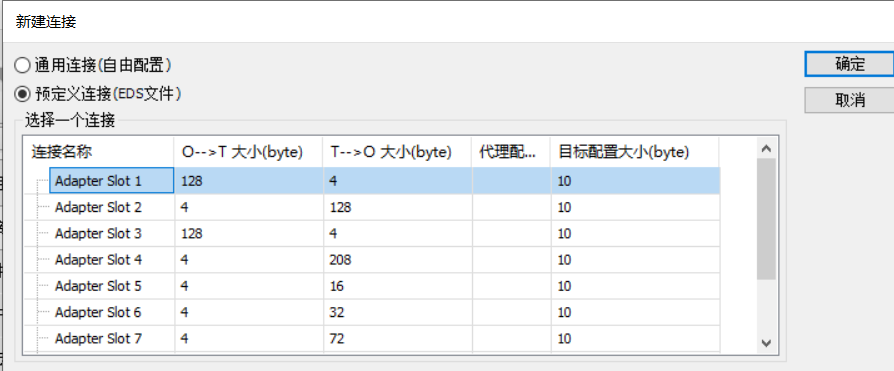
艾利特EC机器人EN_IP通讯,提供了slot0-slot10共11个组内容,具体参见通讯手册。其中slot9对应M Input(从M912开始),slot10对应M output(从M400开始),Slot4可以读取机器人位姿等状态。
本例以Codesys作为EthernetIP Scanner(主站),进行配置讲解,具体步骤如下:
1. 安装Codesys 3.5 sp15
2. 打开Codesys并新建工程
3. 在Codesys 菜单栏-工具-设备存储库,点击“安装”导入附件中对应3.5版本的EC机器人eds文件(下载请见首行)。导入后会出现提示,同时文件会出现在EthernetIP总线下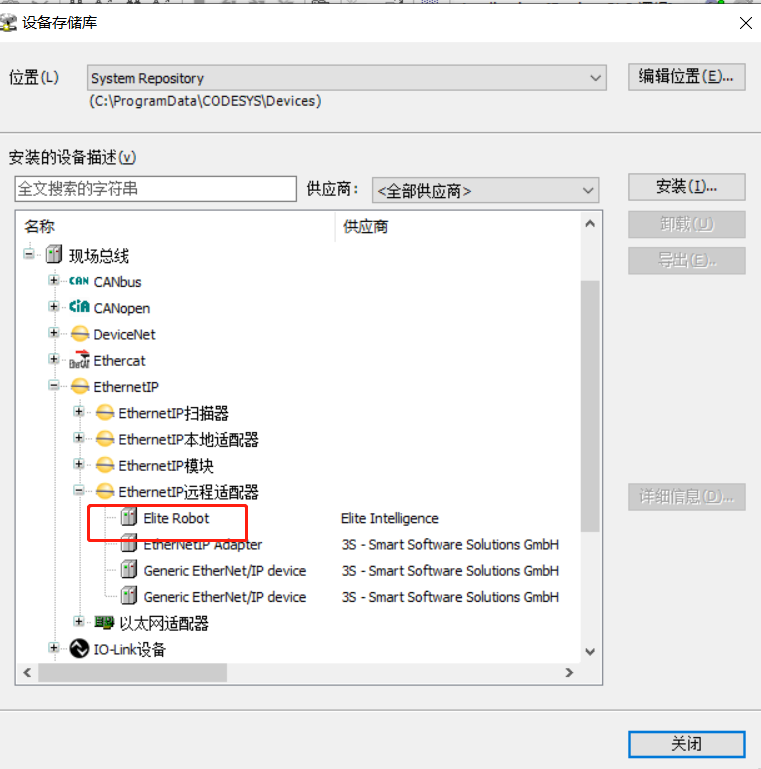
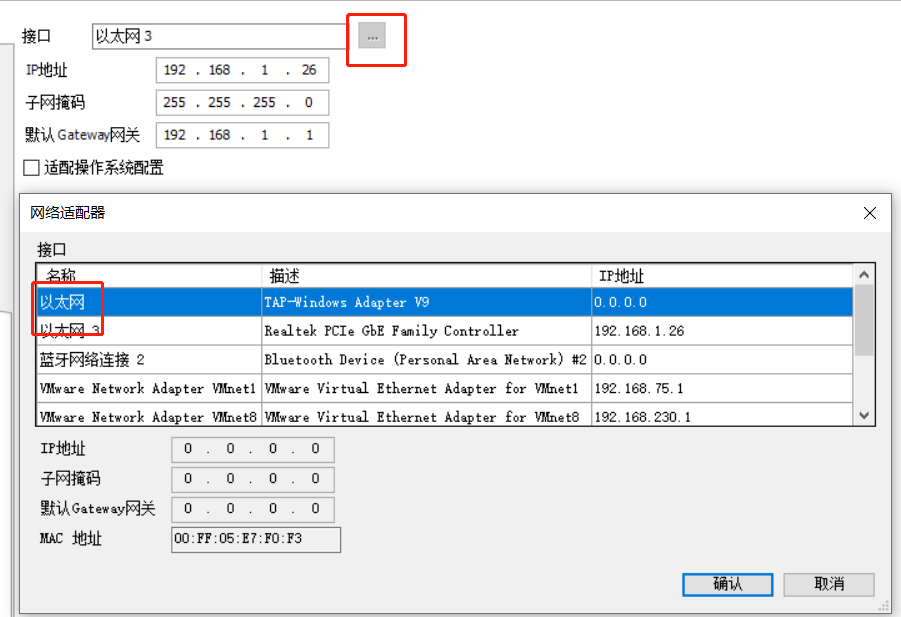
4. 在Codesys中添加EC机器人设备,如下图。并且设置主站iP及机器人IP(与实际一致)

5. 在Ethernet-通用处配置PC ip时,选择对应网卡
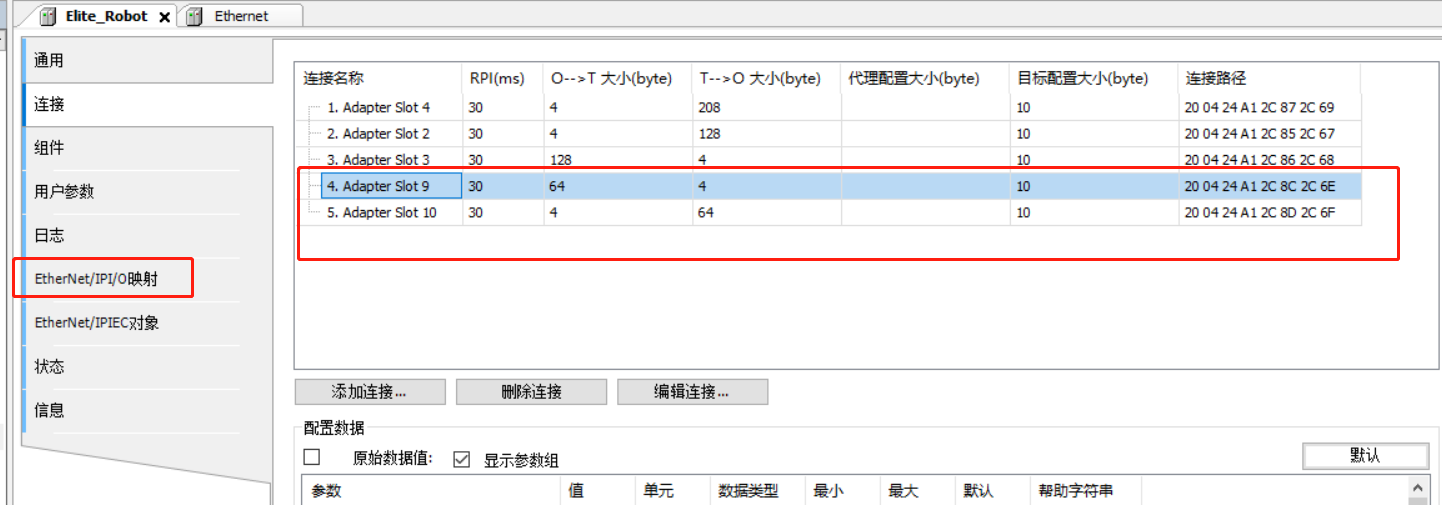
6.进行相关M变量测试,双击步骤7中的Elite_Robot,在下图添加slot9和slot10.稍后可以点击下图的EtherNet/IP io映射查看
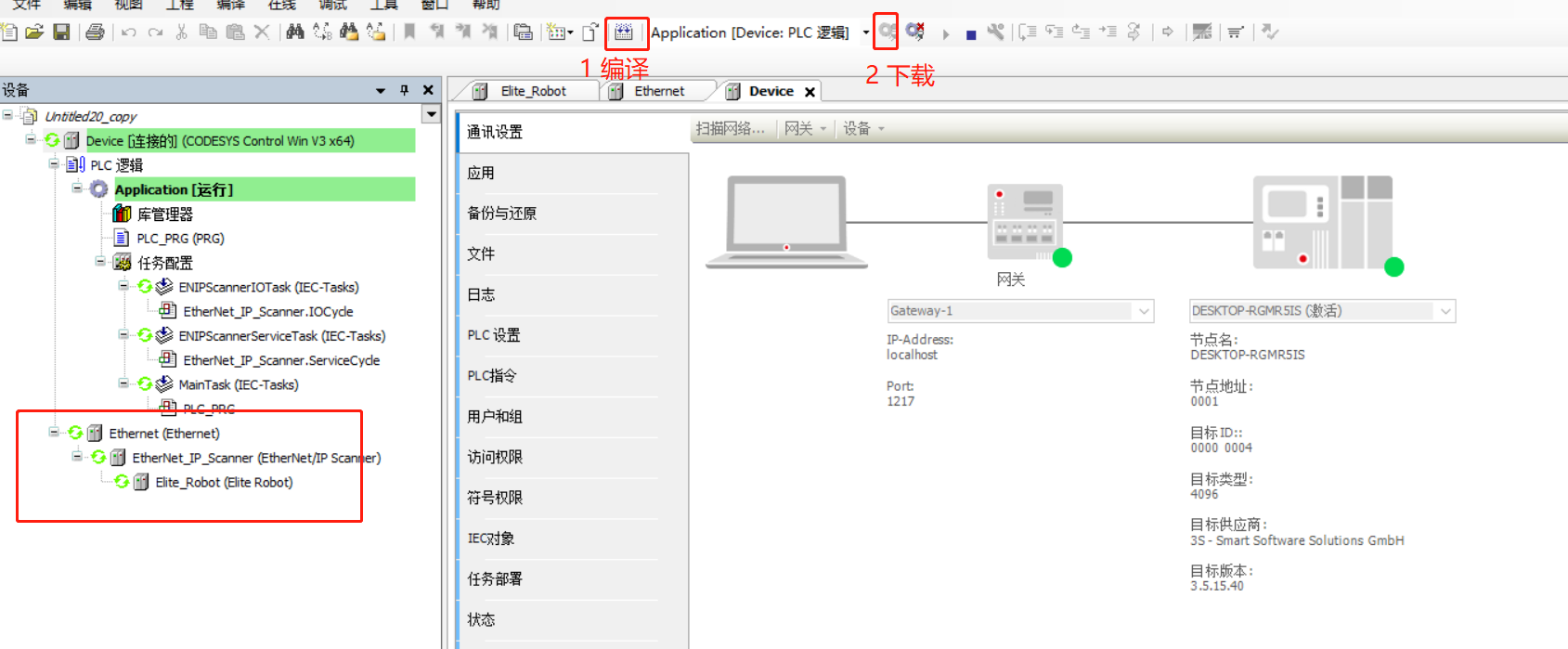
7. 在电脑windows开始处,打开下图的CODESYS Control Win V3-x64,启动codesys plc。确认codesys plc和gateway处于运行状态,图标为彩色。



8. 如图下载,此时左侧总线显示正常运行
9.点击如图位置,可以查看M输出。 对于M输入,可以在预备值写入,并按住ctrl+F7(fn+F7)写入


10. 若要修改配置,需点击下载按钮旁的退出在线模式按钮
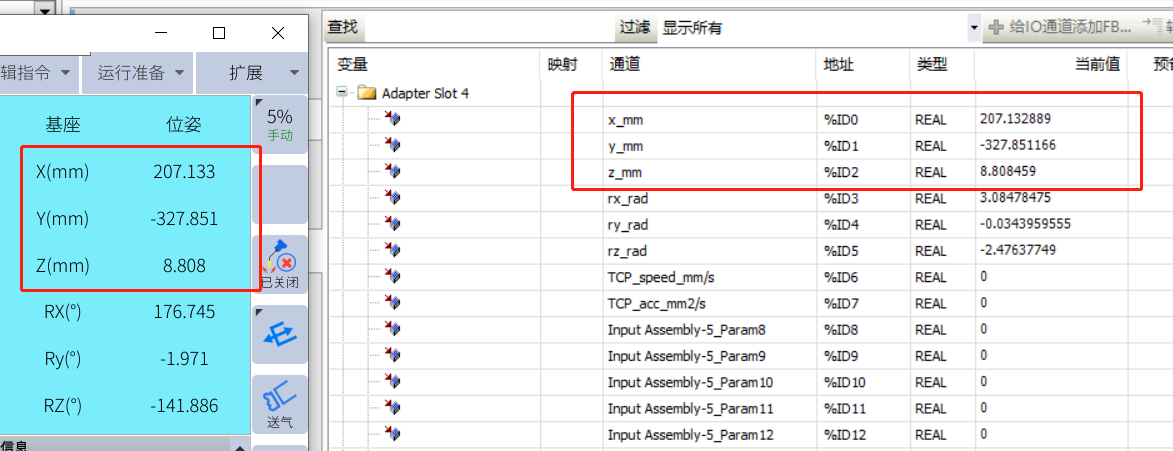
11. 若要查看机器人当前位置,可以插入slot4。对于机器人位置,每个参数均为32bit的 float数据,在codesys对应REAL类型。slot4总长度为208byte。可以按照下图进行修改(即把第一个参数的类型修改为REAL,依次类推,可以修改为0-51个REAL变量。注:把最后多出来的byte删掉,保证slot4 是208byte的输入。)

12.同理可以进行INT数据和FLOAT数据的读写(机器人侧需要编写对应LUA,参考V3.5.2通讯手册)
附录:





