EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】基于Python语言使用OPC UA协议远程控制CS系列机器人
背景介绍-什么是OPC UAOPC UA的全名是OPC Unified Architecture(OPC统一架构)。是OPC基金会应用在自动化技术的机器对机器网络传输协议。有以下的特点:着重在资料收集以及控制为目的的通讯,用在工业设备以及系统中开源标准:标…
分享
手机扫码分享
复制链接
0
1847
2.
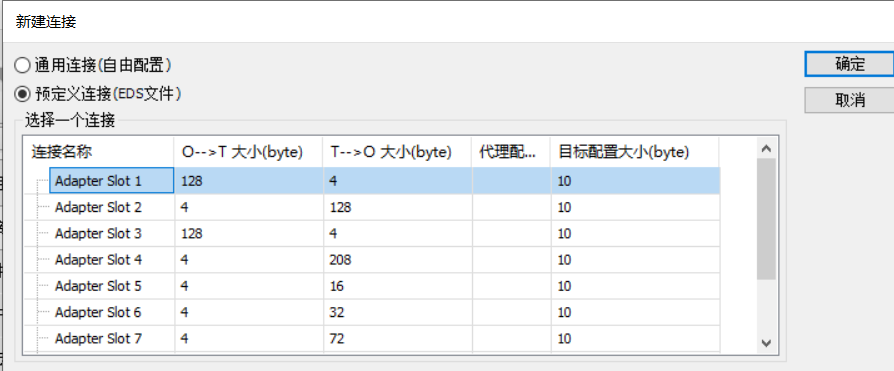
【论坛】EC612通过Ethernet/IP和基恩士通讯问题
EC612机械手通过Ethernet/IP和基恩士通讯,Adapter Slot 0,Adapter Slot 1,Adapter Slot 2,Adapter Slot 3,组中的寄存器对应的EC612地址怎么设置?LUA脚本 ret get_eip_int_input_registers(addr,size) 获取的寄存器值存放的地址是多少,怎么能对应起来?
分享
手机扫码分享
复制链接
0
1196
3.
【论坛】艾利特CS机器人EtherNet/IP总线通讯
艾利特机器人CS系列支持 EtherNet/IP通讯。本文以CODESYS为例。CS机器人eds文件下载:链接:https://pan.baidu.com/s/1QYUQ_xWbrYKs8hz1nE3JLg 提取码:ydmo教学视频:【CS机器人使用EtherNet/IP教学】 注意事项:CS机器人需升级到2.4或以上版本。…
分享
手机扫码分享
复制链接
0
2265
4.
【论坛】CS 机器人搭配 2D 视觉偏移取料
1. CS 机器人搭配视觉工作流程 CS 机器人搭配 2D 视觉,常用于偏移取料。常见流程:来料位置不固定,视觉在固定高位 对产品拍照,算出产品位置后把数据发给机器人,机器人走到对应取料位夹取产品后再去放料。 …
分享
手机扫码分享
复制链接
0
2628
5.
【论坛】昆仑通态触摸屏基于ModbusTCP读写机器人数据
1. 艾利特机器人支持ModbusTCP通讯,并在相应寄存器默认提供了包括机器人轴角度,笛卡尔坐标等数据。具体寄存器定义参见https://www.elibot.cn/download/technique?category&series=1&keyword&page_index=5 中的EC_SDK_Socket手册_Ver3.9.22. 例如手册描述…
分享
手机扫码分享
复制链接
0
1872
6.
【论坛】CS机器人末端与DH手抓modbus_rtu通讯
CS机器人末端与DH手抓modbus_rtu通讯1假设当前使用的DH抓手通讯速率如下,则在CS机器人的的工具IO设置界面,按照如下设置2可以使用如下代码,控制夹爪打开/关闭或者自定义行程。使用时,可以直接示教器界面插入脚本,代码行…
分享
手机扫码分享
复制链接
0
1706
7.
【论坛】EC系列与西门子S7-1200的配置使用
EC系列的GSD文件下载:链接:https://pan.baidu.com/s/1u36YRvsRZJ6fiCqYFwcZHw?pwd=Xc9a提取码:Xc9a 配置视频请访问: https://www.bilibili.com/video/BV1Nc411L7jM/?spm_id_from=333.999.0.01. PROFINET通讯介绍1.1 PROFINET 通讯种类可分为PROFINET CBA及PROFINET IO二种:(1)PR…
分享
手机扫码分享
复制链接
0
4495
8.
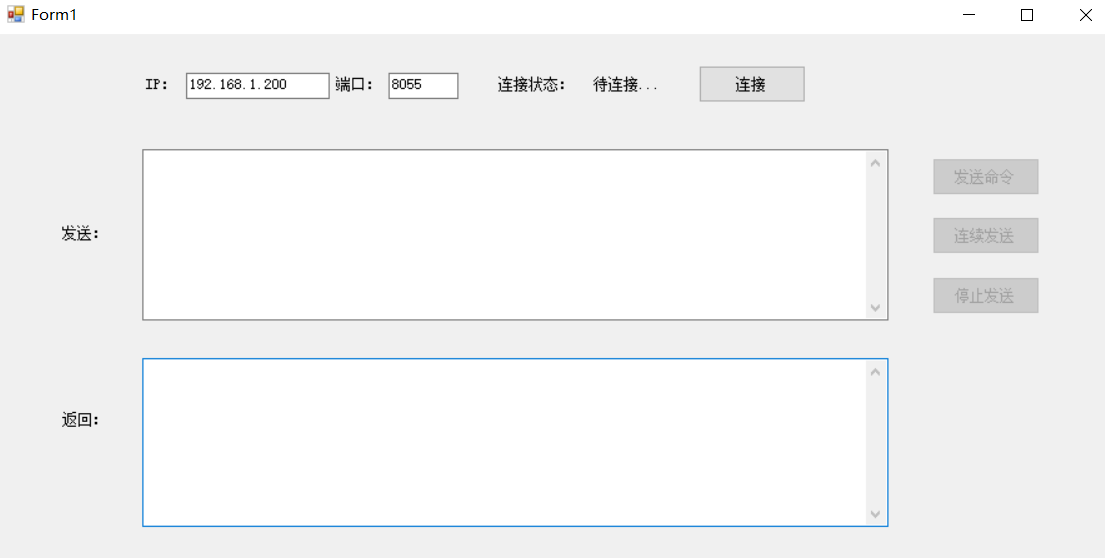
【论坛】C#上位机-针对EC机器人
EC机器人为支持用户进行二次开发而开放了机器人控制器端口,其中8055端口是控制接口,可以控制机器人的启停,运动,获取机器人各种状态,以及运动学的一些算法等。其实现的方式就是TCPIP通讯,机器人做服务器,用户需要…
分享
手机扫码分享
复制链接
0
1720
9.
【论坛】LUA读取德森特力传感器脚本
根据德森特 力传感器手册,机器人通过485通讯,参照以下指令,可以获取传感器返回的当前FX,FY,FZ和MX,MY,MZ读浮点数格式的测量值:发送:01 03 04 00 00 0c 44 77返回:01 03 18 46 23 A3 14 C6 23 B7 14 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 5B 70…
分享
手机扫码分享
复制链接
0
1214
10.
【论坛】2台机器人基于modbus的M变量交互通讯
1#机器人 希望读写 2#机器人的m变量,达到实现io通讯效果(不需要io接线,基于modbus),例如本机的m560-m575作为本机的do,控制2#机器人的m560-m575(2#机器人的di)2#机器人的m576-m591作为2#机器人的do,控制本机的m576-m591(作为本机…
分享
手机扫码分享
复制链接
0
1216
11.
【论坛】CS机器人modbus通讯
目录CS机器人modbus通讯 1.1机器人作为modbus通讯主站 1.2机器人作为modbus通讯从站2. 通讯失败原因排查1. CS机器人modbus通讯1.1 机器人作为modbus通讯主站Elite CS 系列支持通过标准的 Modbus TCP 协议获取或者修改机器人的内部数…
分享
手机扫码分享
复制链接
0
2980
12.
【论坛】如何设置CS机器人控制柜IP地址
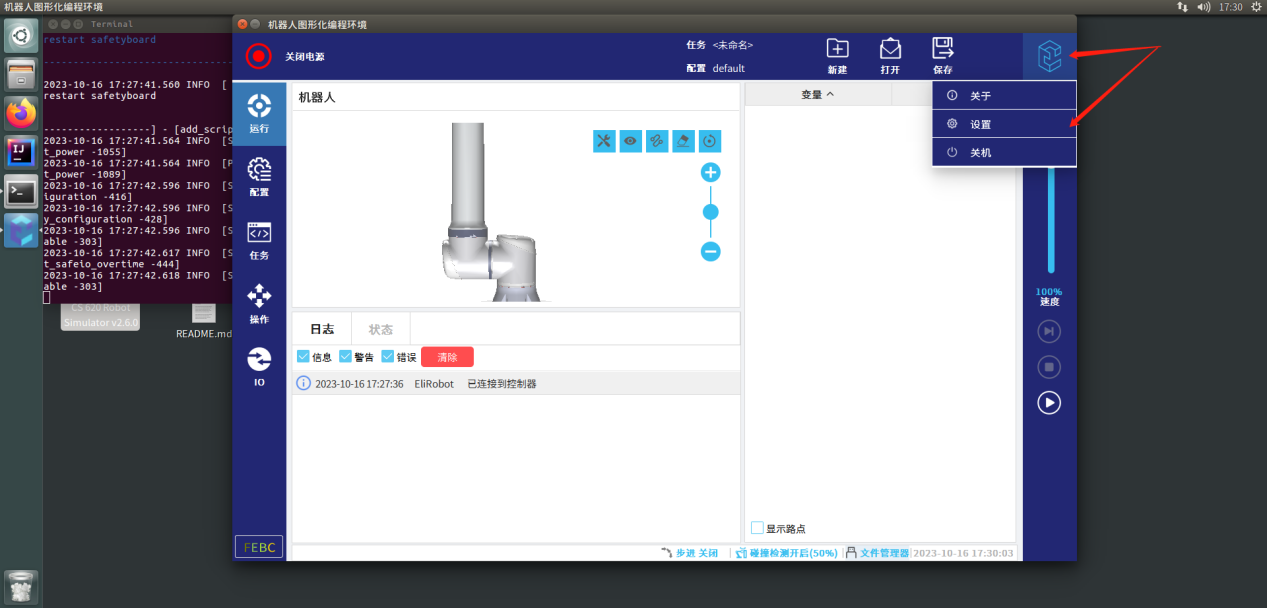
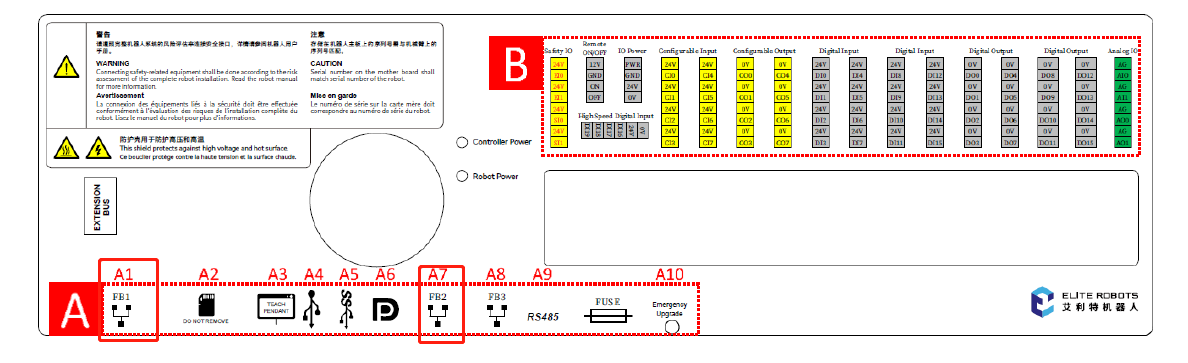
CS机器人控制柜有3个网口,分别为FB1,FB2,和FB3。 FB3留待后期增加功能,目前不使用。PC可以连接FB1口,PC通过VNC远程操控示教器界面,或者通过FTP上传/下载机器人文件机器人运行脚本中的socket指令时,通过FB2口与外界通讯。机器人与PLC进行PROFINET通讯时,也连接FB2口。若机器人作为modbus master读写其他slave设备时,也通过FB2口进行。可以进入示教器,点击右上角 艾利特机器人图标,点击 设置,进入网口设置,对FB1和FB2网口进行IP地址设置
分享
手机扫码分享
复制链接
0
1744
13.
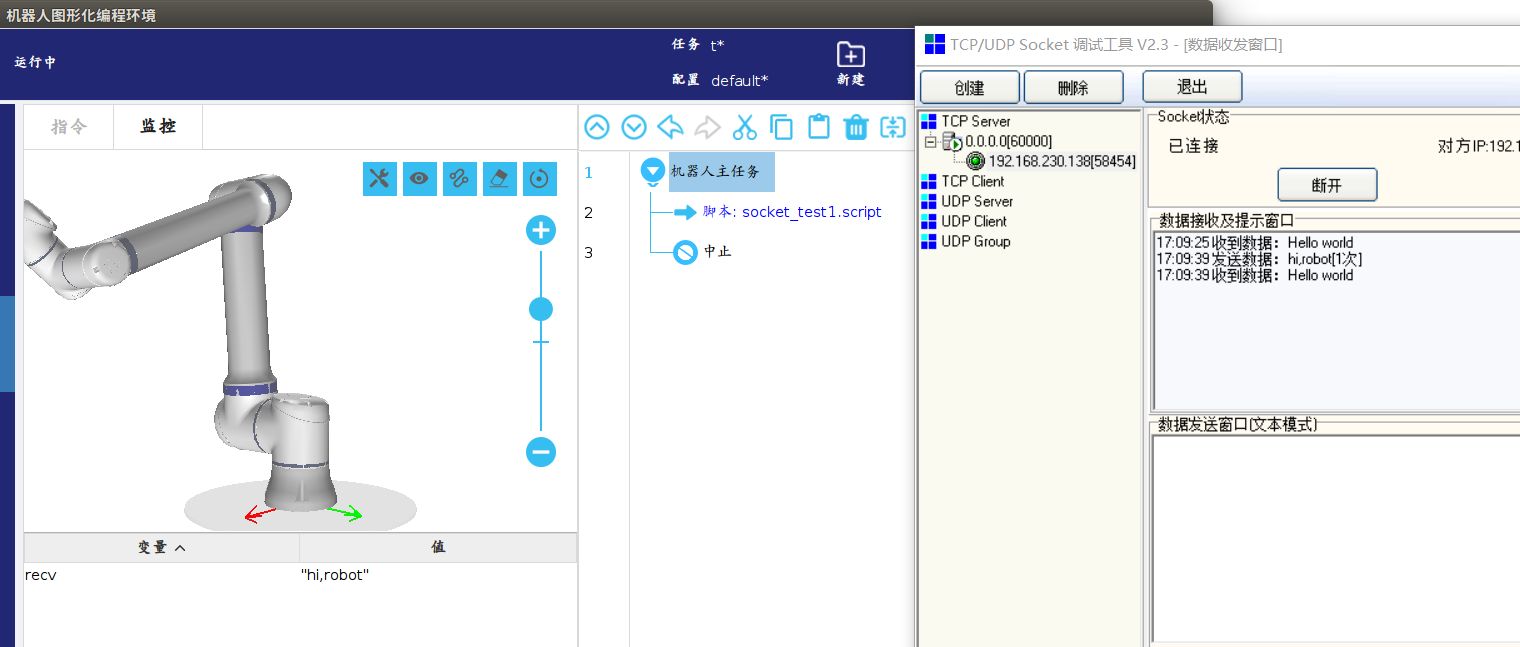
【论坛】机器人作为socket客户端与外部设备通讯
机器人可以作为socket客户端,与外部设备通讯。相关指令可以参见CS机器人脚本手册(https://www.elibot.cn/#/download 下载 CS_脚本手册_V2.0.3)例如,可以在机器人中创建如下脚本socket_open("192.168.230.1",60000,"socket_1") # 打开socket,此处IP地…
分享
手机扫码分享
复制链接
0
2840
14.
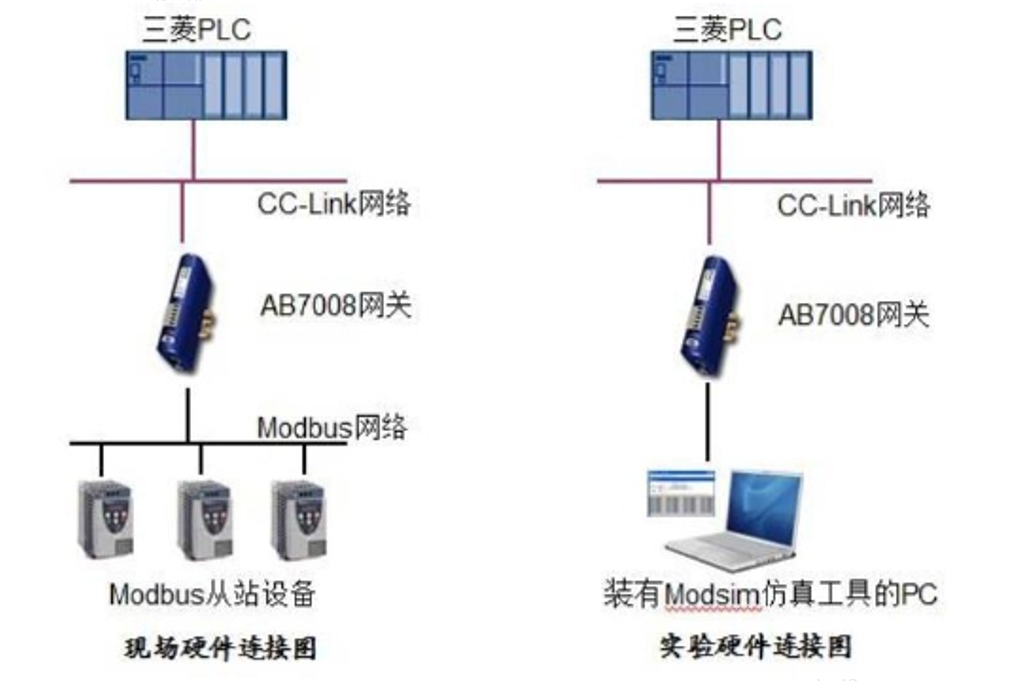
【论坛】Modbus rtu转CCLINK模块配置
1. 概述本文介绍使用 GXWorks3软件配置三菱PLC和AB7008实现CCLINK通讯过程,其硬件连接示意图如图 1-1所示。所需设备及软件如表 1-1所示设备/软件名称/型号版本三菱 FX5U系列PLCFX5U-64MT/ES三菱 CC-Link主站模块Anybus CC-Link 从站模块AB7008三…
分享
手机扫码分享
复制链接
0
2016
15.
【论坛】485通讯接受字符串型16进制数据转数组
EC机器人,可以通过以下指令进行485通讯。其中rs485_recv接收到的数据将整体转为字符串类型,例如机器人收到的是0A0B0C0D01020304,则recv_buff收到的是"0A0B0C0D01020304"的字符串。希望把这8个16进制数(每个是8bit)转为对应10进制数存…
分享
手机扫码分享
复制链接
0
1538
16.
【论坛】艾利特EC机器人EthernetIP总线通讯
eds文件请联系Elite官方技术支持邮箱:tech@elibot.cn或通过链接:https://pan.baidu.com/s/1WIocIJ_vTFl-AcbVu5oUZQ 提取码:ac2f艾利特EC机器人从V3.5开始正式支持EthernetIP通讯(机器人作为adapter从站)。无需对机器人进行特殊设置,无需设置安…
分享
手机扫码分享
复制链接
0
3842
17.
【论坛】EC机器人Lua脚本和jbi程序交互示例
背景随着机器人技术的不断进步,机器人的工作已经不仅仅是简单的执行运行指令,往往会伴随着大量的计算和通讯任务。其中通讯用来和外部设备交互,做数据传输或一些逻辑控制,而计算则常用来做一些数学运算,进制转换…
分享
手机扫码分享
复制链接
1
3339
18.
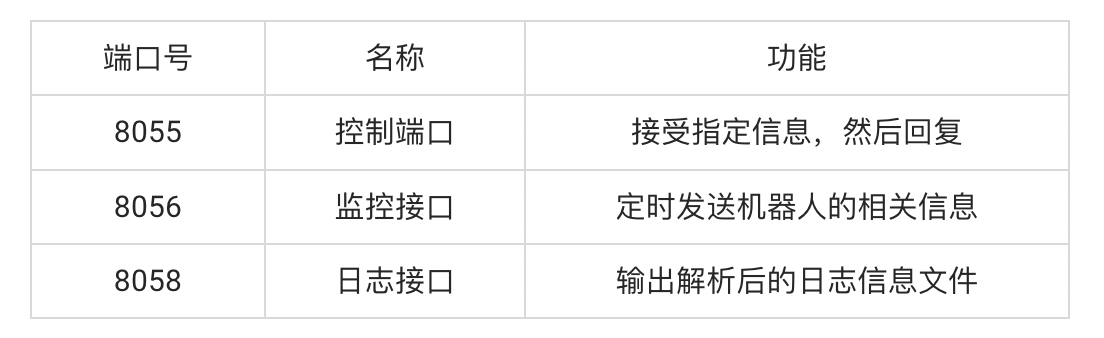
【论坛】SDK快速Q&A
二次开发介绍Elite机器人的二次开发端口见下图:端口介绍8055Elite 8055端口是通过socket通讯向控制器发送指定格式的json字符串来实现的,其中机器人侧为服务器,上位机为客户端。通过8055端口,几乎示教器上的所有功能都可以实…
分享
手机扫码分享
复制链接
3
5083
19.
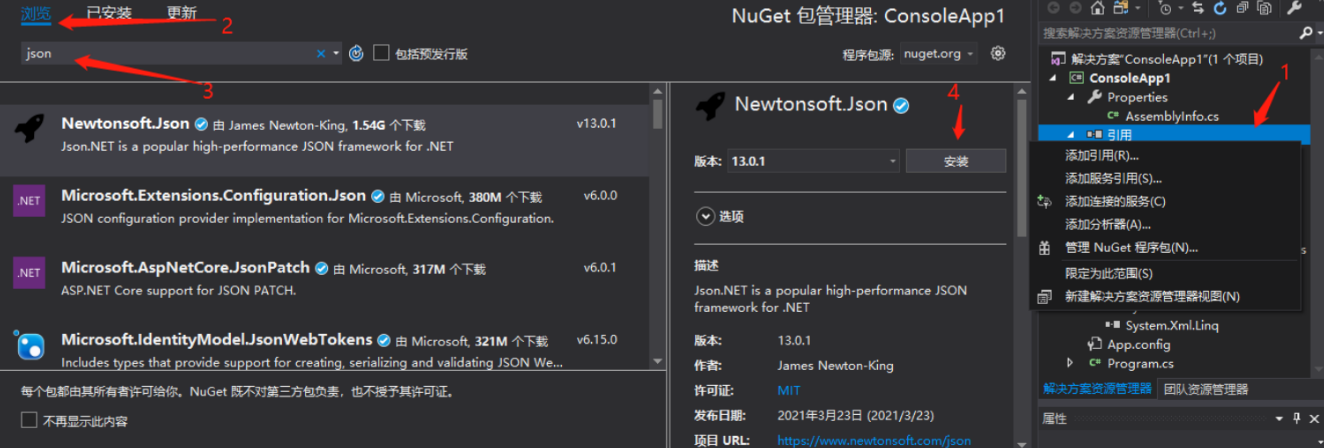
【论坛】VS2017配置C#使用json格式
配置环境用户可通过 socket 通讯向控制器控制端口 8055 发送指定格式的 json 字符串来实现相关sdk 功能。VS软件配置1.鼠标右键点击方案名2.选择管理 NuGet 包管理器3.在浏览选项输入 json,安装第一个插件包 Newtonsoft.Json4.添加引用,…
分享
手机扫码分享
复制链接
0
1653
20.
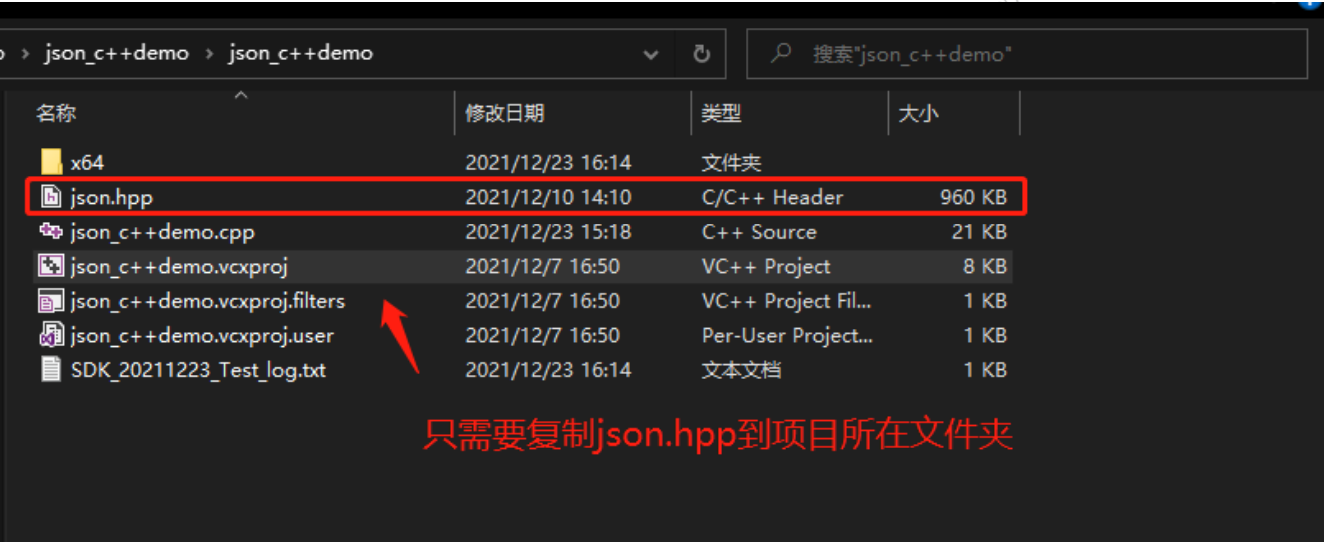
【论坛】vs2017 配置 C++使用 json 协议
配置环境用户可通过 socket 通讯向控制器控制端口 8055 发送指定格式的 json 字符串来实现相关 sdk 功能。 复制文件只需要用到一个 json.hpp 文件。 1.1 复制 json.hpp 文件到项目.vcxproj 文件目录。添加引用在代码前端加入#include "json.hp…
分享
手机扫码分享
复制链接
0
2269
21.
【论坛】lua脚本实现TCP客户端通信及交互示例
Elite机器人支持TCP/UDP的服务器和客户端,本章将介绍TCP客户端的实现。在实际应用场景中,若机器人与相机进行通讯,通常情况下,相机会作为一个服务器,并且已经规定客户段请求的数据内容,机器人按照指定的数据内容向相…
分享
手机扫码分享
复制链接
0
3304
22.
【论坛】ModBus主从通讯-主站篇
介绍ModBus是一种串行通信协议,一种标准的工业通信协议,同时是目前工业电子设备之间常用的连接方式。艾利特机器人分别支持ModBus主、从站功能,从通讯的形式上分为MoBus TCP和ModBus RTU,其中ModBus从站功能通过配置即可。通…
分享
手机扫码分享
复制链接
0
2908
23.
【论坛】ModBus主从通讯-从站篇
介绍ModBus是一种串行通信协议,一种标准的工业通信协议,同时是目前工业电子设备之间常用的连接方式。艾利特机器人分别支持ModBus主、从站功能,从通讯的形式上分为MoBus TCP和ModBus RTU,其中ModBus从站功能通过配置即可。通…
分享
手机扫码分享
复制链接
1
4244
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件