
艾利特机器人CS系列支持 EtherNet/IP通讯。本文以CODESYS为例。
CS机器人eds文件下载:
链接:https://pan.baidu.com/s/1QYUQ_xWbrYKs8hz1nE3JLg 提取码:ydmo
注意事项:
CS机器人需升级到2.4或以上版本。
上位机/plc 连接fb1网口;pn连接fb2网口。
在示教器中点击“配置”-“通讯”-“EtherNet/IP”,请启用EtherNet/IP功能。

具体步骤:
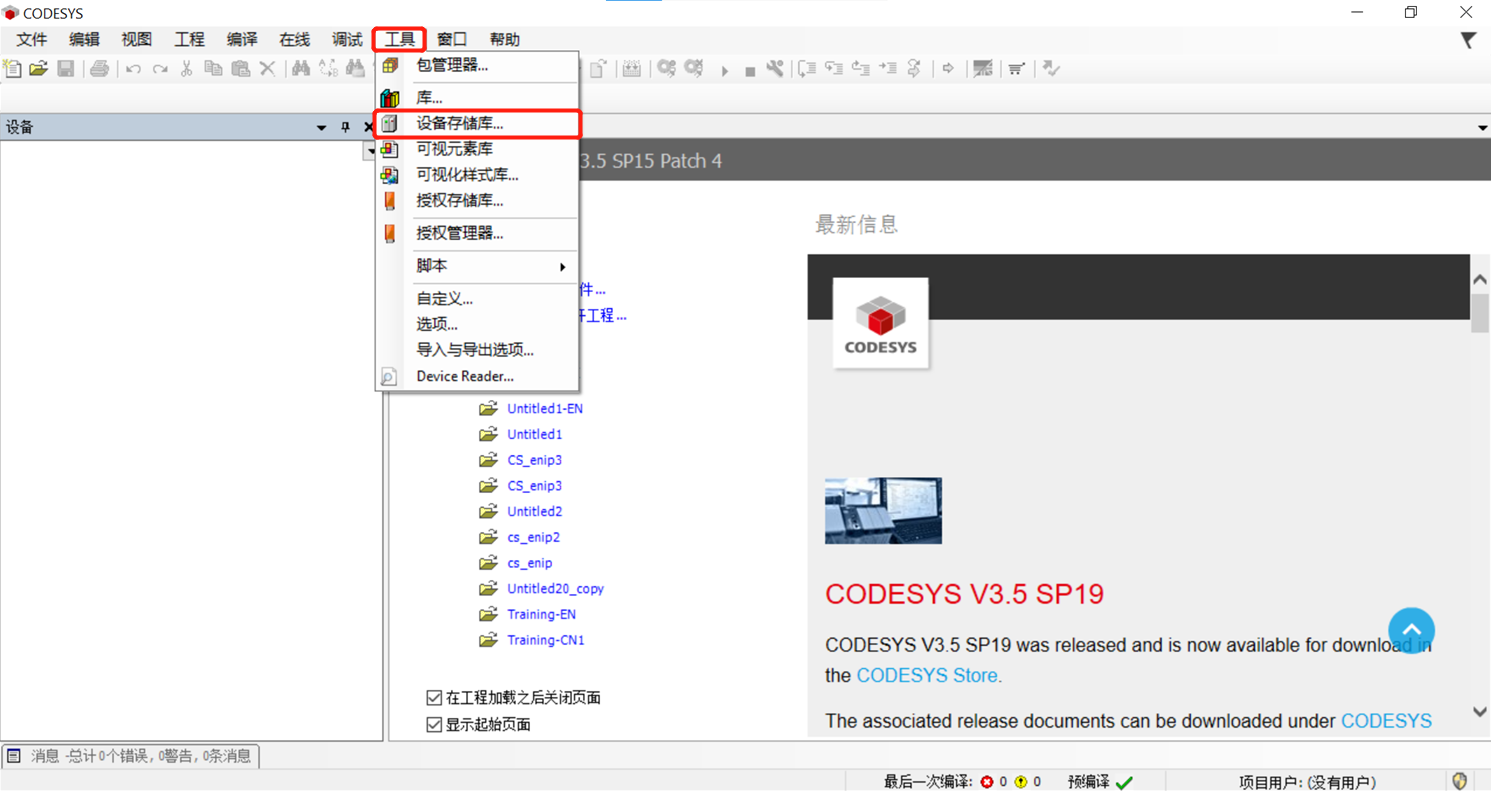
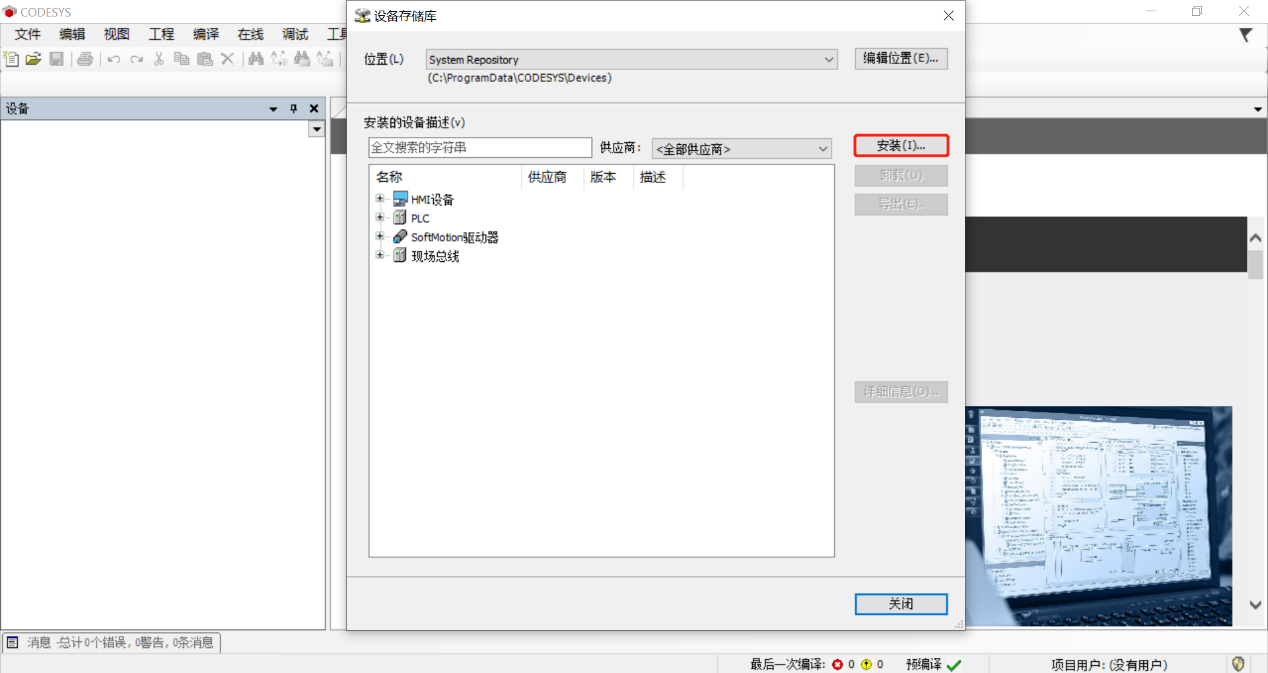
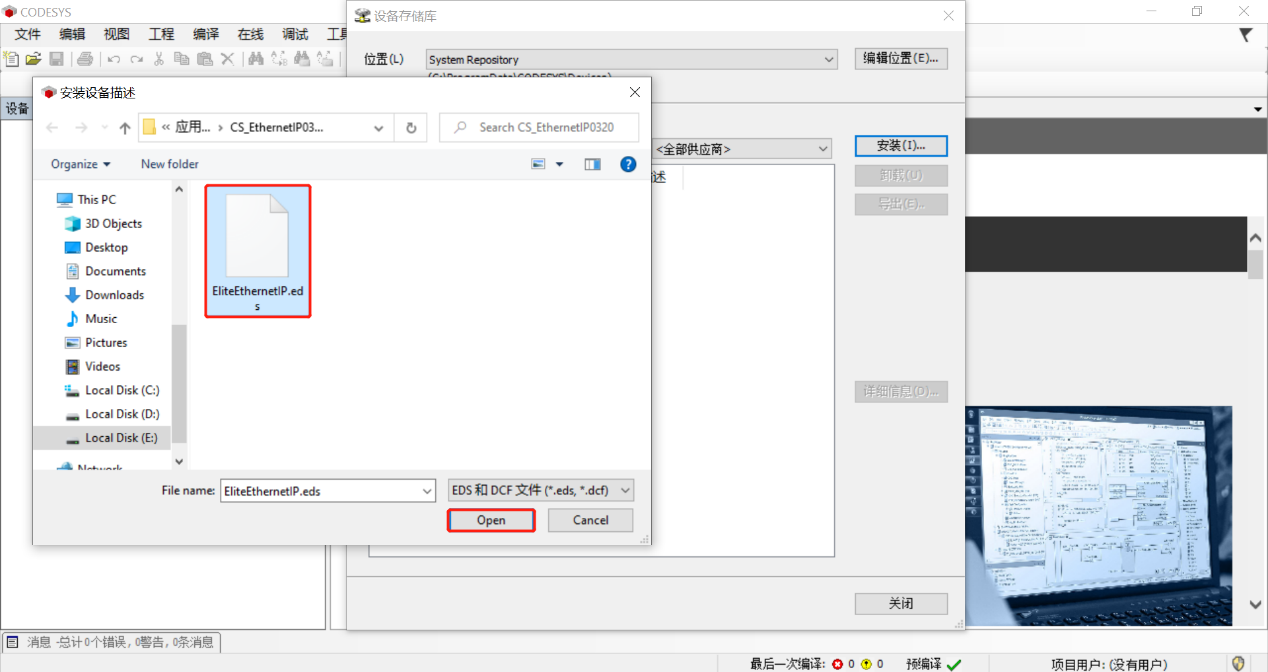
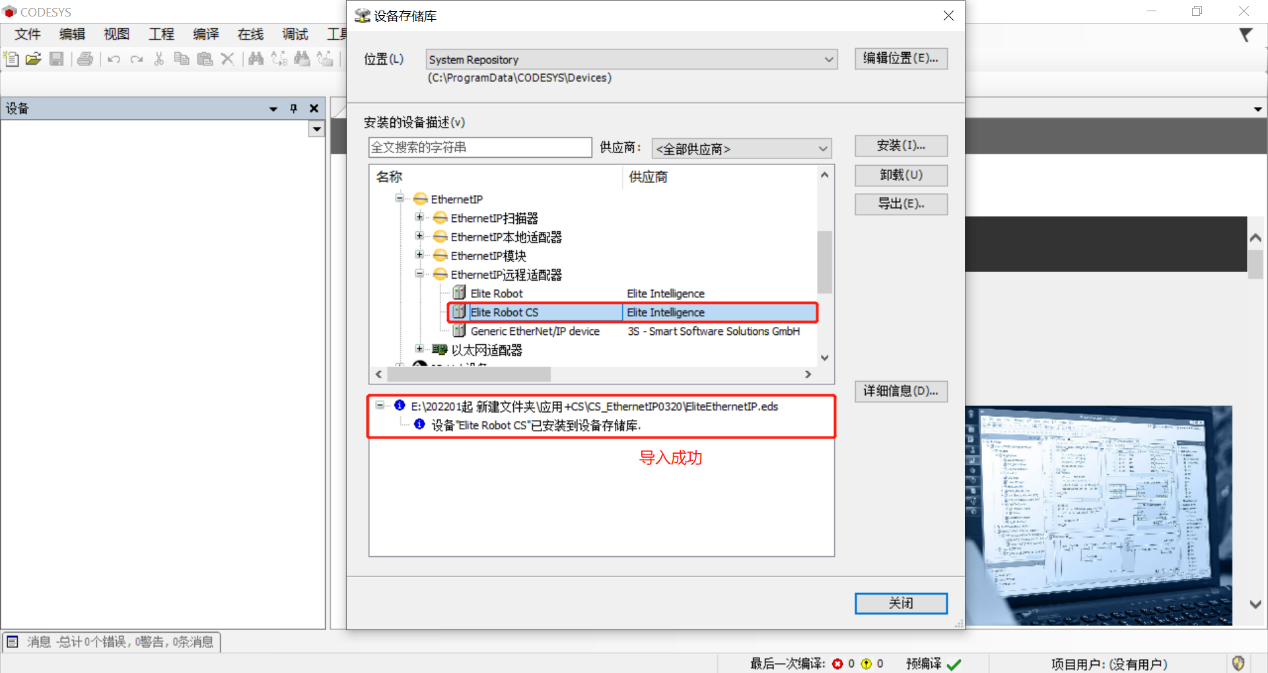
以CODESYS为例,打开软件后,点击菜单栏“工具” –“设备存储库”,点击右侧“安装”,找到保存至本地的CS的eds文件,点击“打开”,导入成功后提示“设备Elite Robot CS已导入到设备存储库”。
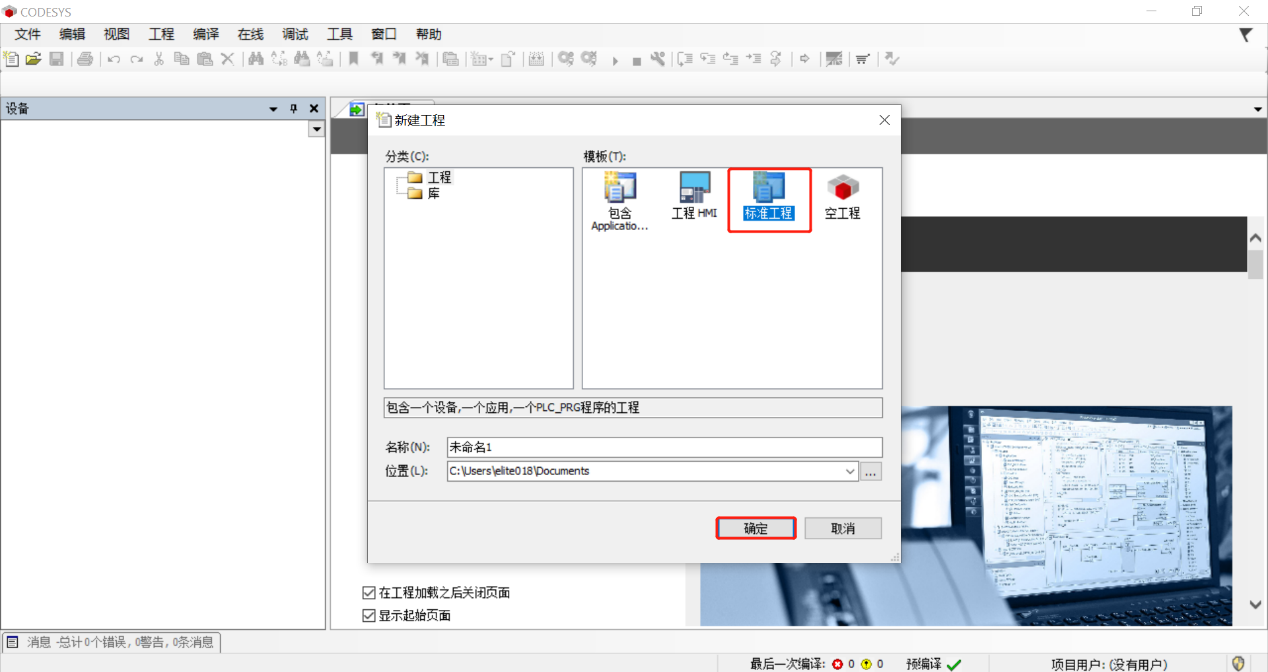
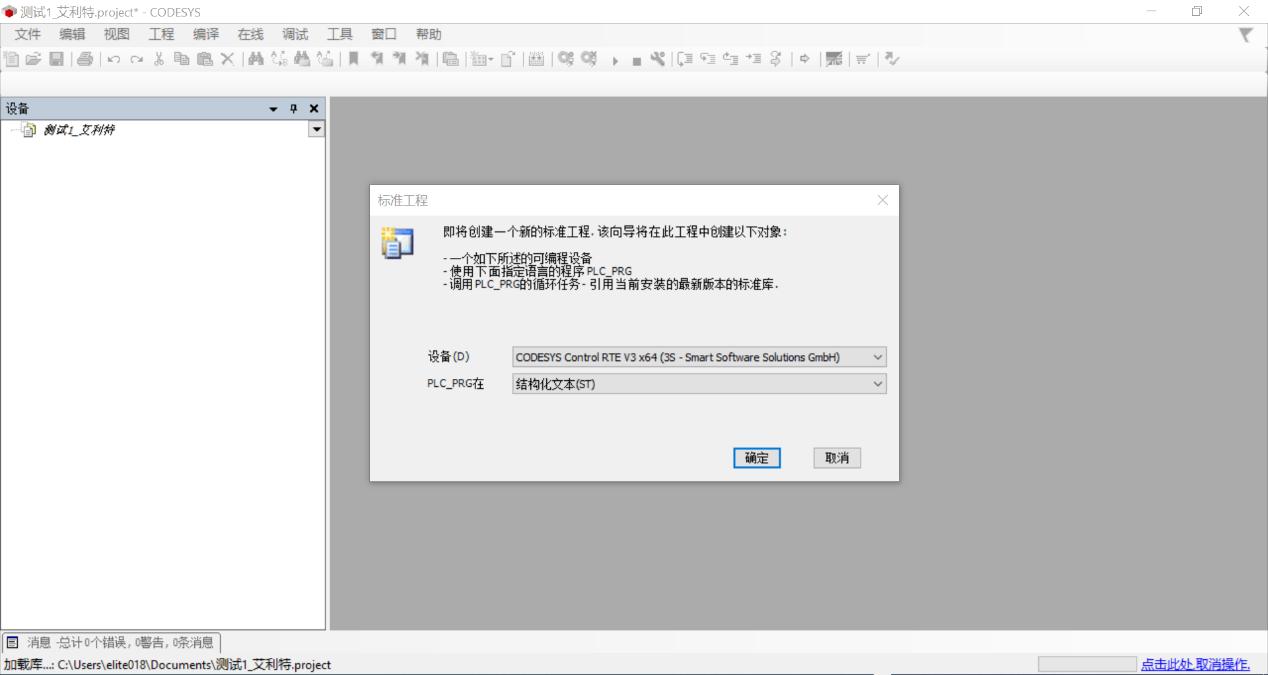
点击“文件”-“新建工程”,在弹窗中选择“标准工程”,进行命名,点击“确定”。根据情况选择“设备(D)”、“PLC_PRG在”。
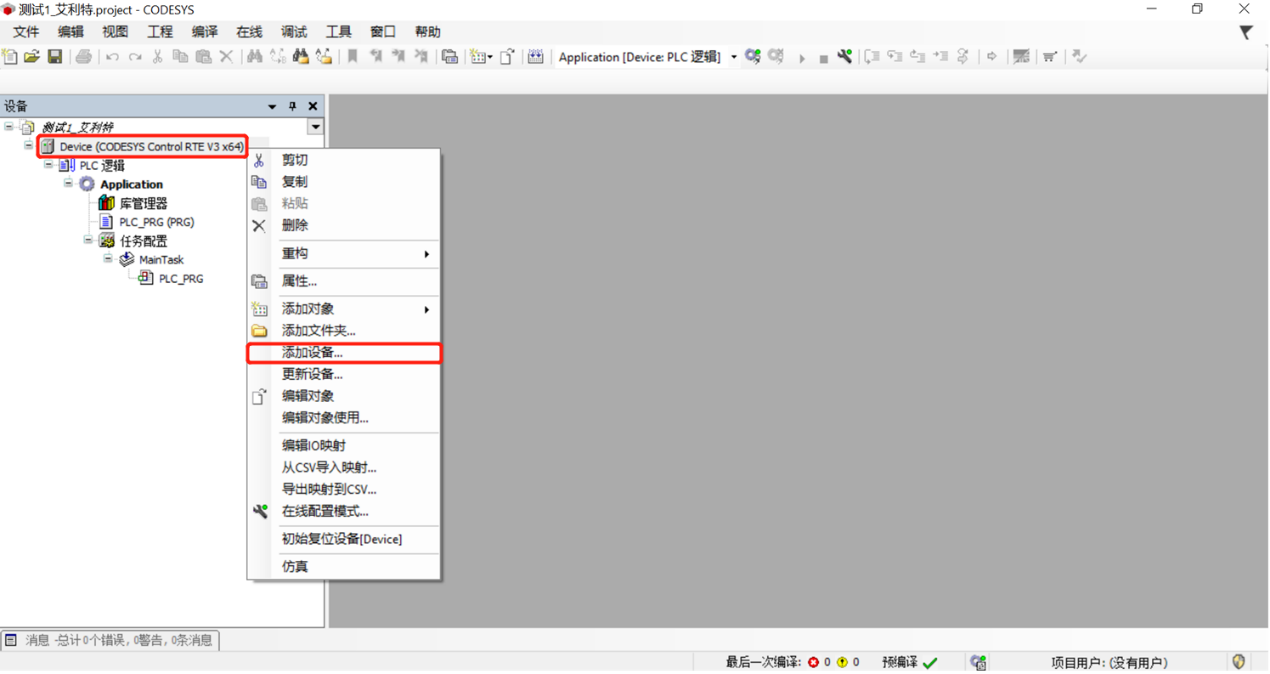
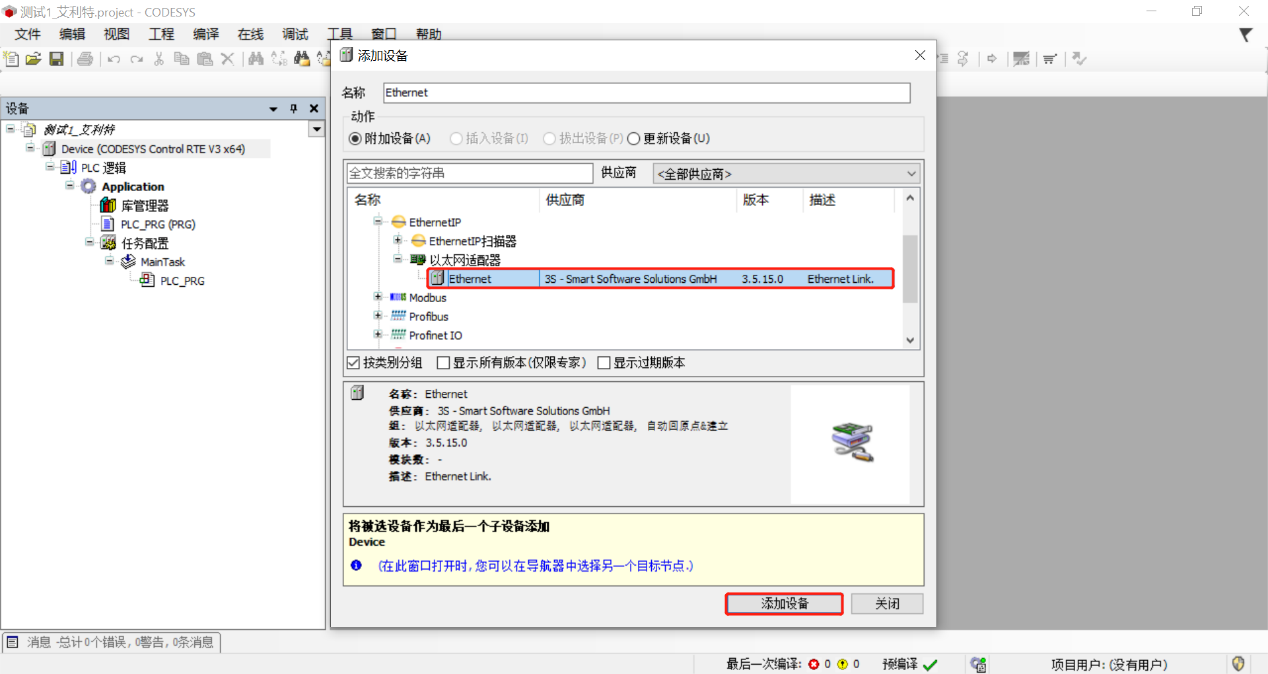
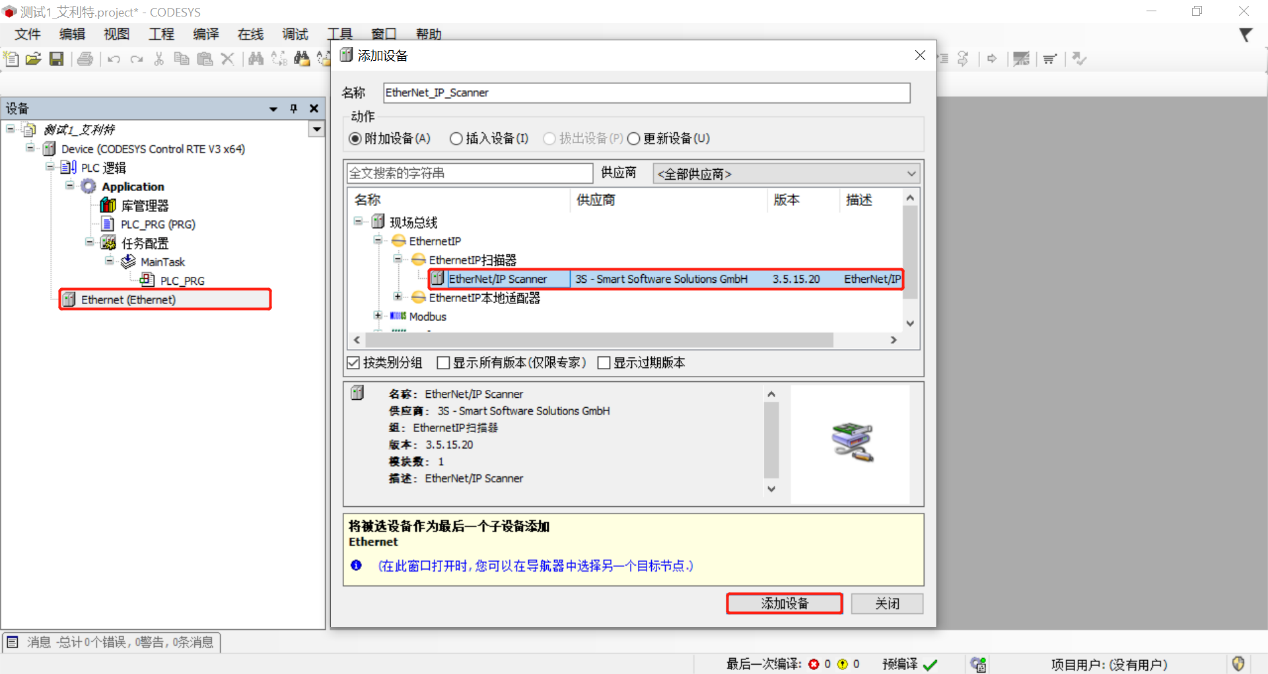
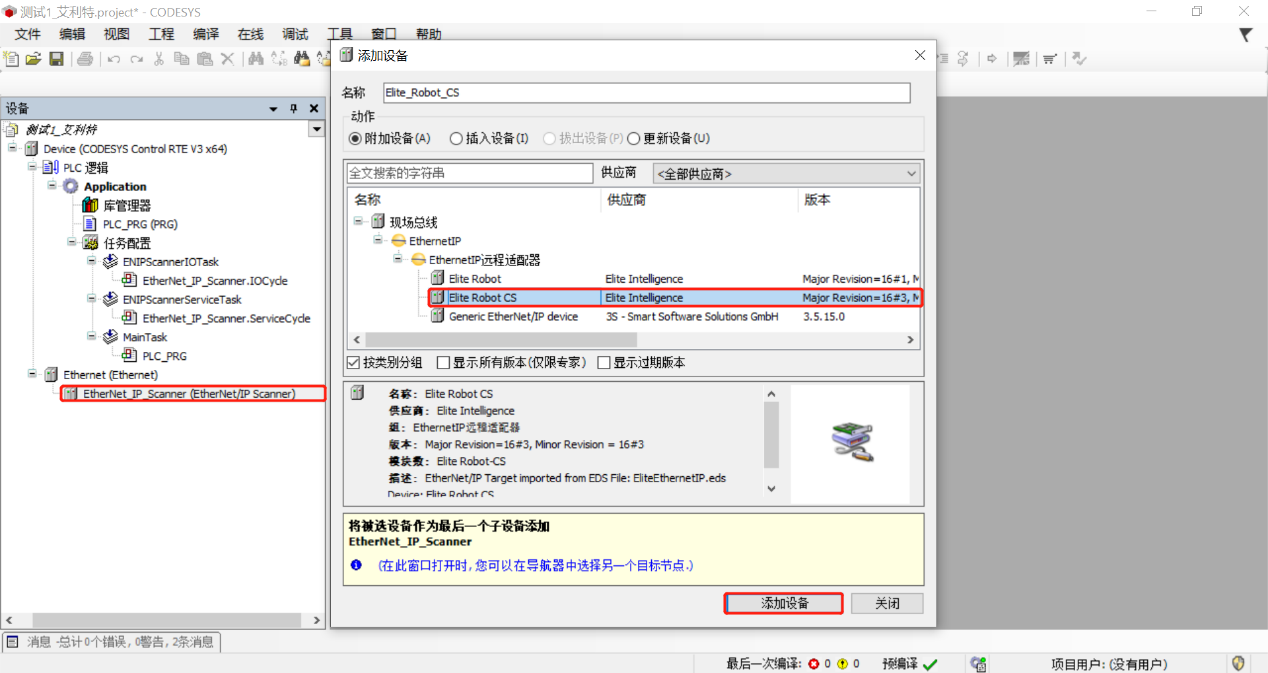
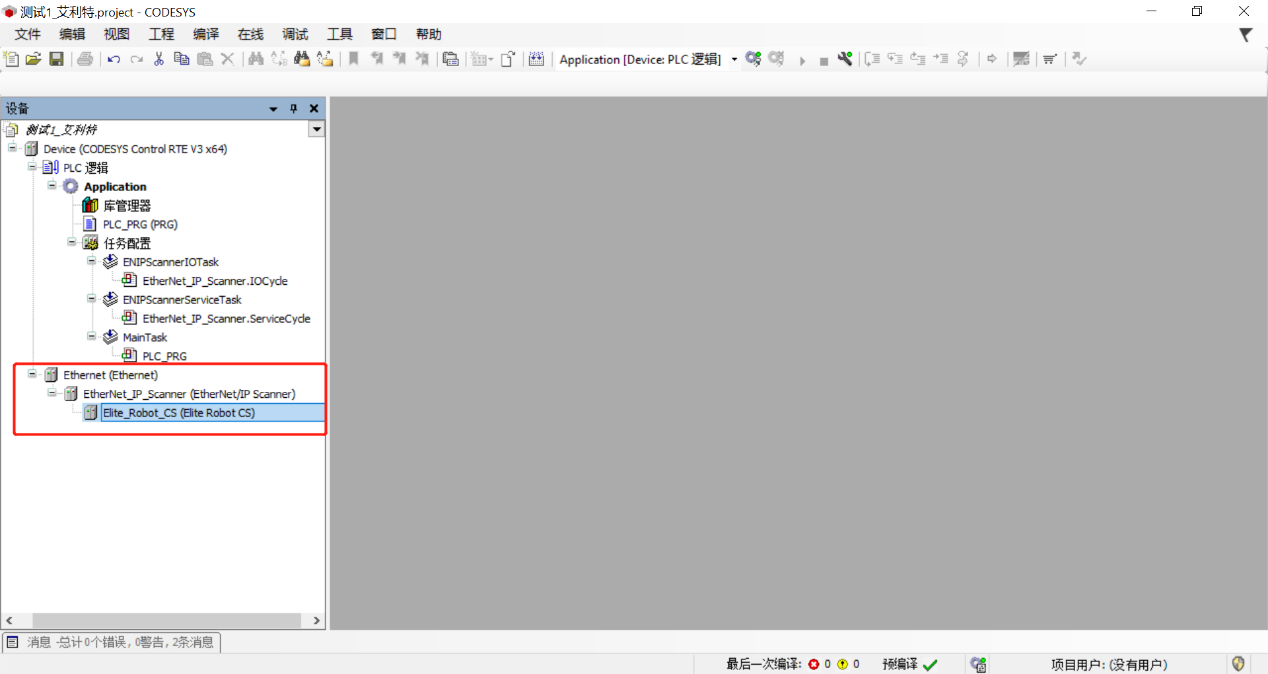
程序打开后,右键点击“Device”,选择“添加设备”-“Ethernet”,添加完成后,右键点击出现在左侧列表中的“Ethernet”,选择“添加设备”-“Ethernet/IP Scanner”,添加完成后,右键点击出现在左侧列表中的“Ethernet/IP Scanner”, 选择“添加设备”-“Elite Robot CS”,添加完成后,将出现在左侧列表(如图所示)。
添加完成如下图。
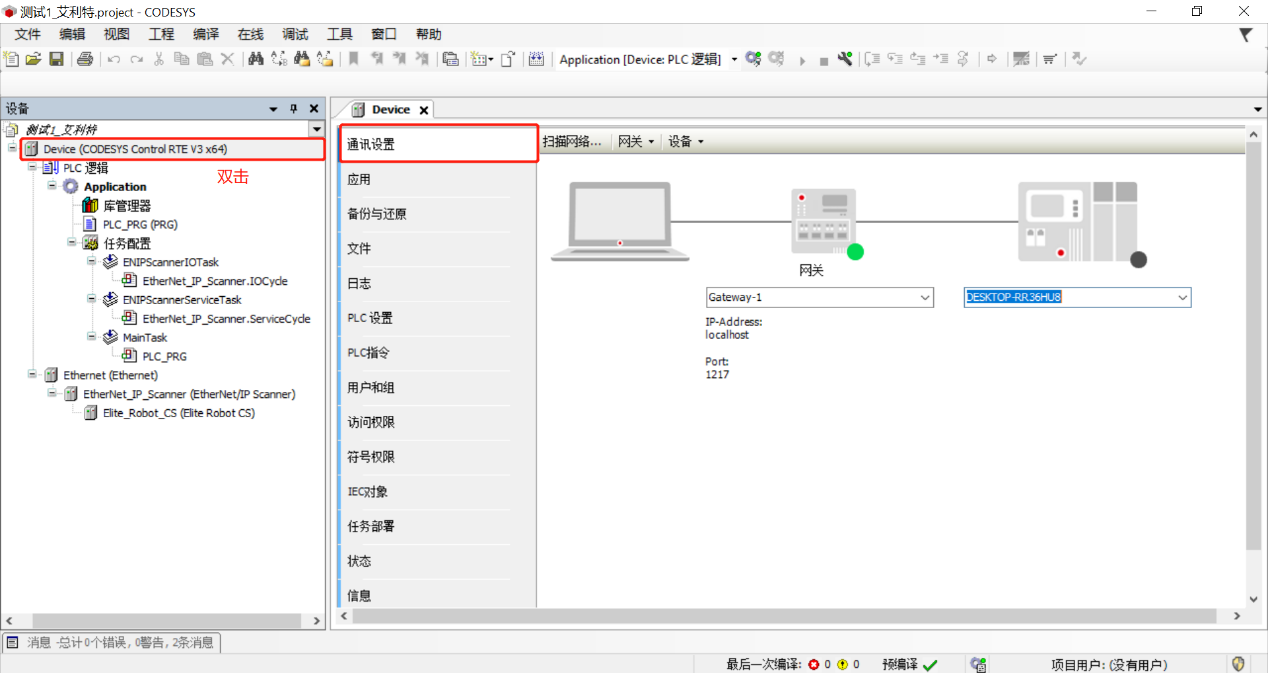
运行CODESYS Gateway以后,双击“Device”,选择“通讯设置”-“扫描网络”。
双击“Ethernet”-“通用”,确认网络设置。上一步扫描网络后,自动填充此处,显示为“以太网”、PC的IP地址。
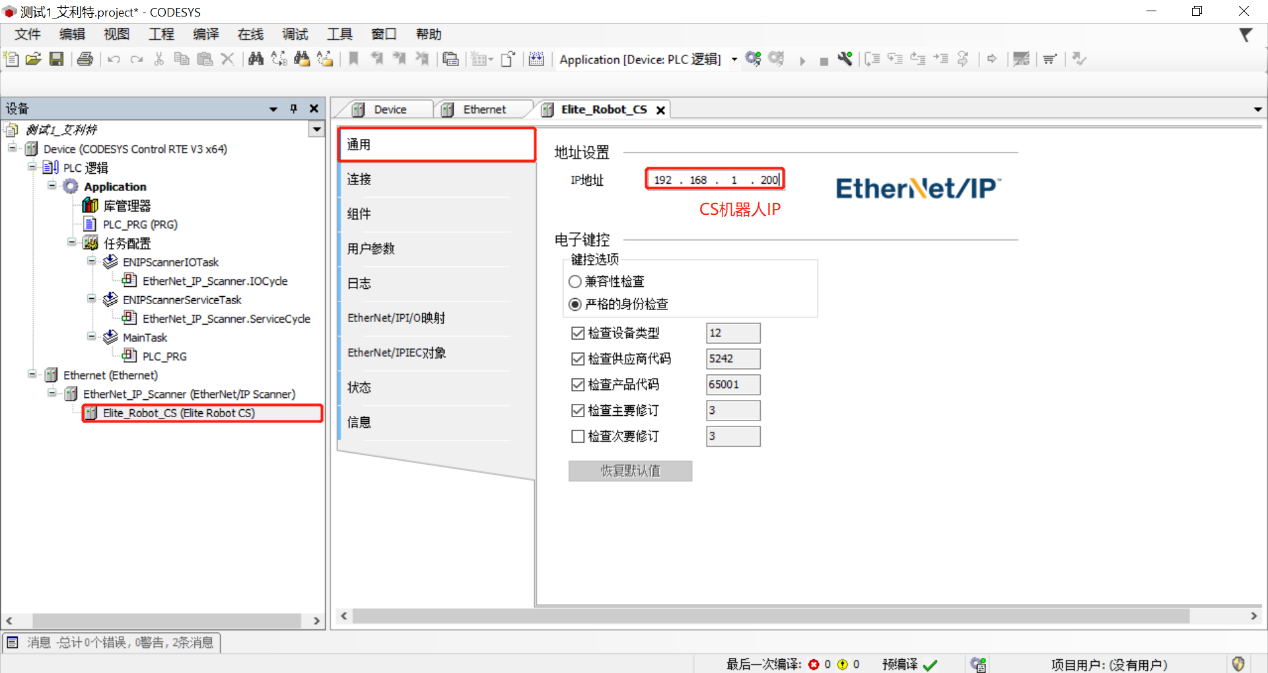
双击“Elite Robot CS”-“通用”,此处IP地址应为CS机器人IP地址(FB1)。
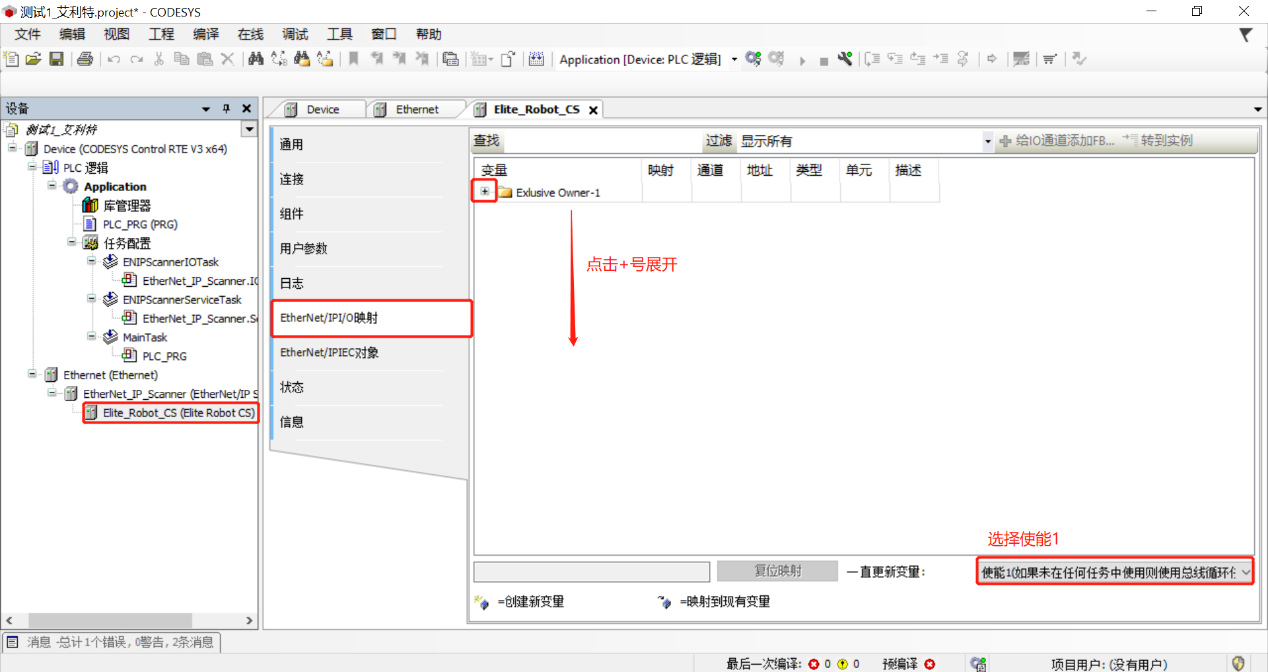
双击“Elite Robot CS” –“EtherNet/IPI/O映射信号”,可点击“变量”下方的“+”展开各变量。请注意:右下方 “一直更新变量”需选择使能1。
点击上方“编译”-“登录到”-“启动”。连接成功后左侧列表显示为绿色。
机器人读写数据需要在示教器中运行相关指令,例如脚本指令“write_output_float_register()”用于写入值(浮点数),“read_input_float_register()”用于读取(浮点数)。





