
ModBus是一种串行通信协议,一种标准的工业通信协议,同时是目前工业电子设备之间常用的连接方式。
艾利特机器人分别支持ModBus主、从站功能,从通讯的形式上分为MoBus TCP和ModBus RTU,其中ModBus从站功能通过配置即可。
通过ModBus从站功能,外部设备作为主站可以与机器人进行数据的交互从而达到逻辑控制和数据的传递,同时也可以通过读一些指定的寄存器去获得机器人的当前关节角度、关节速度、当前TCP位姿、当前TCP速度、数字输入输出和模拟量输入输出信息。
Elite机器人支持ModBus TCP从站以及ModBus RTU从站,均可通过示教器界面直接进行配置。
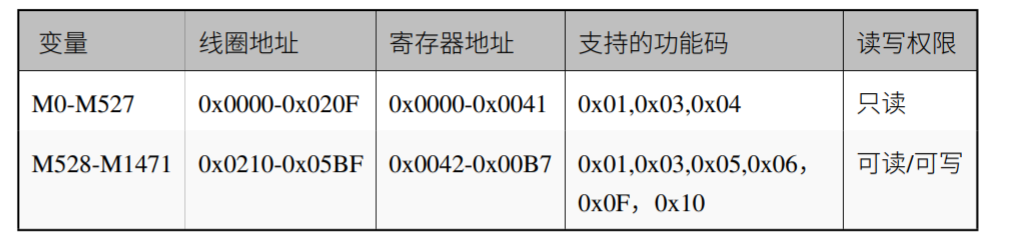
目前Elite机器人支持对虚拟变量M的操作,M为BIT型变量。单个M变量为线圈,多个连续的M变量可为寄存器 。
其中M变量支持的功能码如下图:
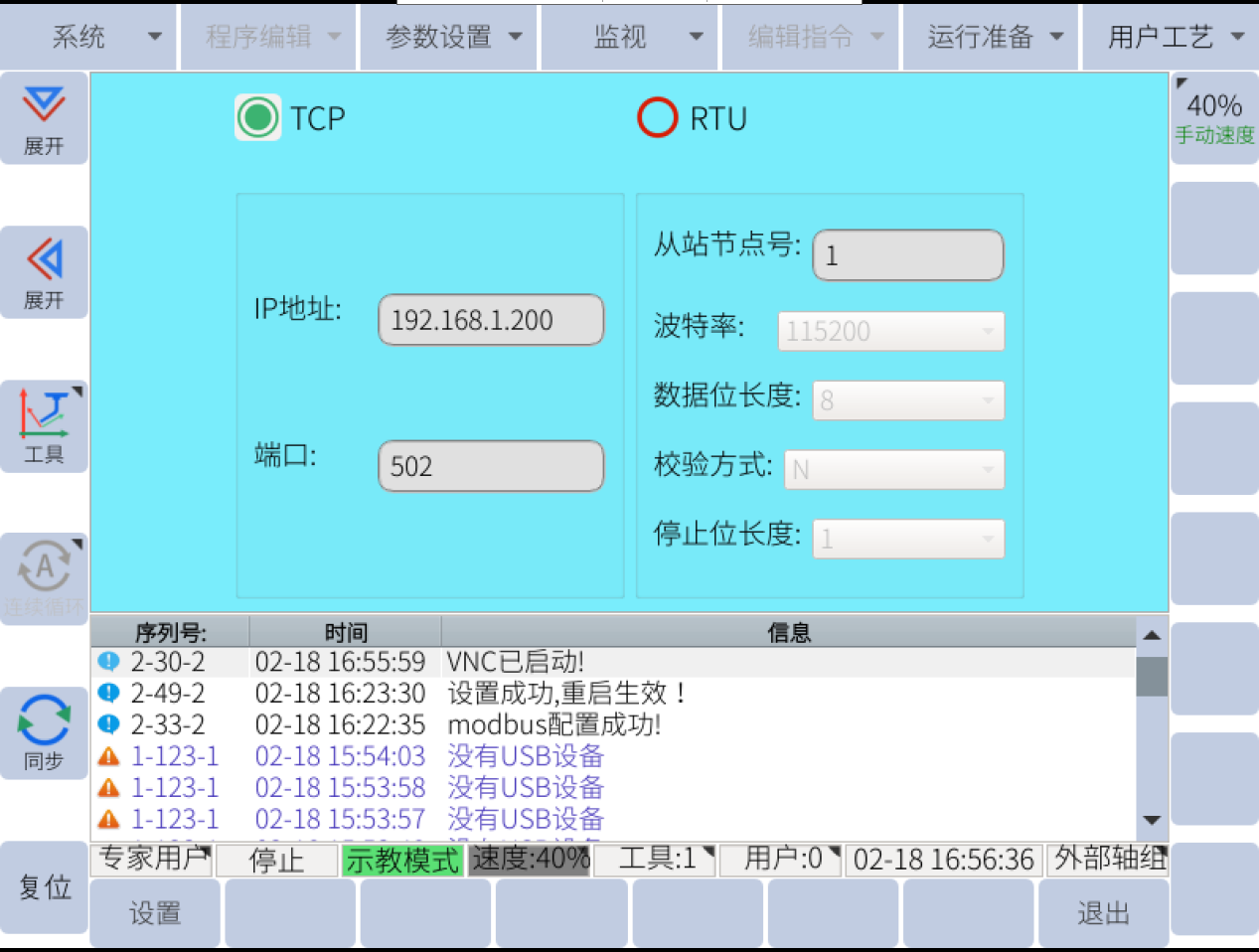
ModBus TCP 物理层接口为以太网接口。
连接参数上IP固定为机器人的IP地址(该地址可以通过系统配置-网络配置进行修改),端口号固定为502。
ModBus TCP从站会建立一个TCP服务器,外部设备可以通过建立TCP客户端进行连接使用。
Modbus RTU物理层接口为串口形式。
ELITE 控制器 485 端口为特殊的接插件,针脚定义为:2 为 GND,4 为 485+,3 为 485-
连接参数上需要设置从站号、波特率、数据位长度、校验方式和停止位长度,以上参数可通过示教器界面进行配置。

艾利特机器人使用的是标准的ModBus通讯协议,在配置完从站的类型和相关参数后,可以使用ModBus调试助手或者网口、串口调试助手发送标准的报文内容进行调试使用。
艾利特机器人也提供了配套的通讯协议手册,里面详细介绍了从站功能的使用以及验证的报文内容,可以参考使用。






