【论坛】【CSEN101】How to create MOBUS RTU communication with tools for CS series robot
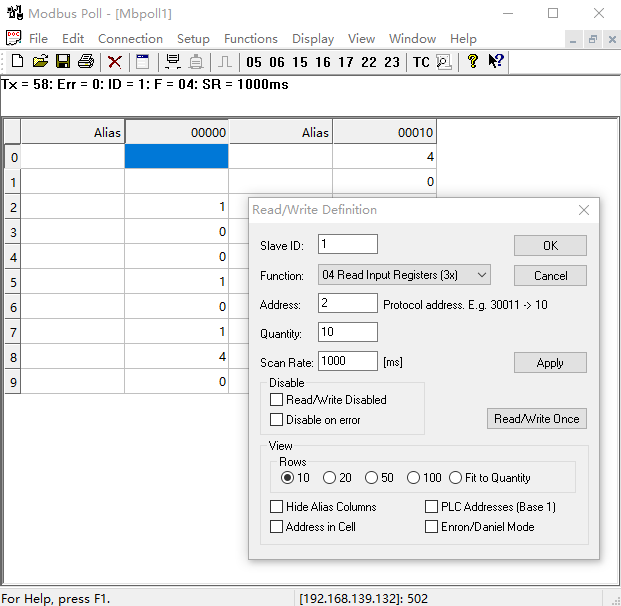
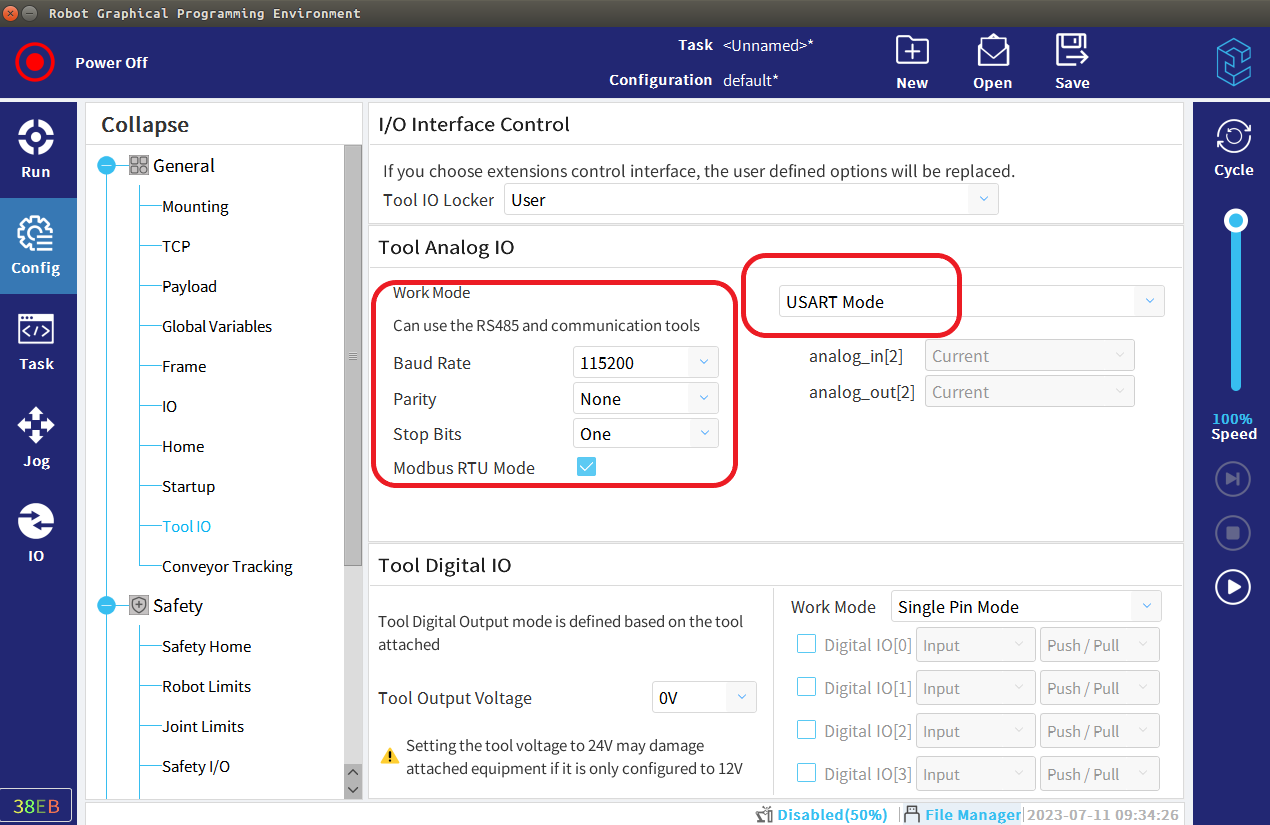
CS series support both MODBUS TCP and MODBUS RTU communication,which is the same as EC series. This post describes how to use MOSBUS RTU for tool flange port, a shielded and twisted pair RS485 cable is used. While in real application the robot may act as