実際の機械構造の制限またはソフト リミットの制限により、ロボットの動作空間に逆運動学の解はありません。つまり、現在の座標系に基づいてロボットはロボットの各関節軸の回転角度を計算できません。協働ロボットのワークスペースでは、これらの逆運動方程式が解を持たない点のセットを「特異領域」と呼びます。
協働ロボットが特異領域または特異領域に近い場合、ロボット アームの自由度が低下し、移動できなくなります。 一部のジョイントの角速度は無限大になる傾向があり、逆演算方程式を解くことができず、機械の損傷や人身傷害に深刻な影響を与えます。
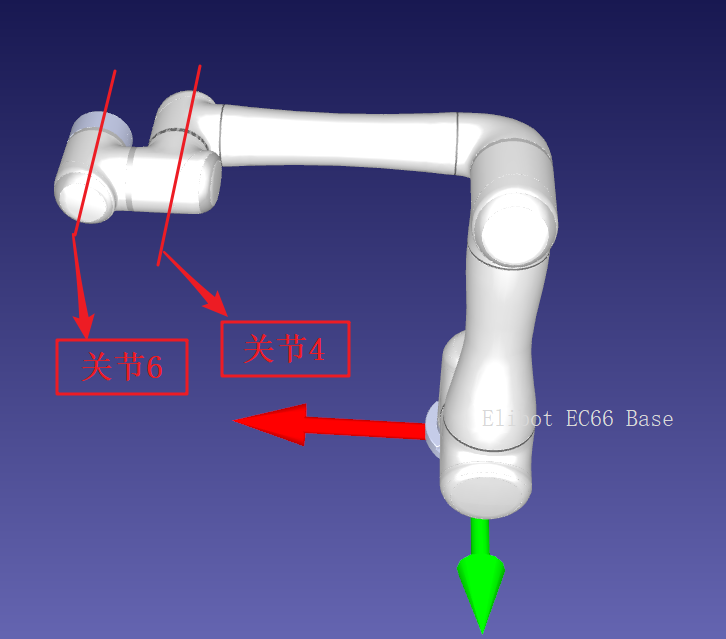
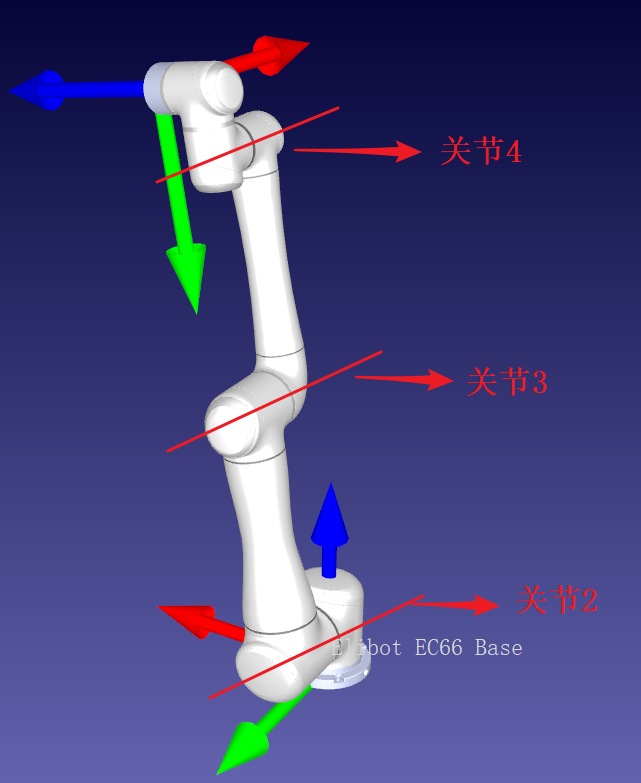
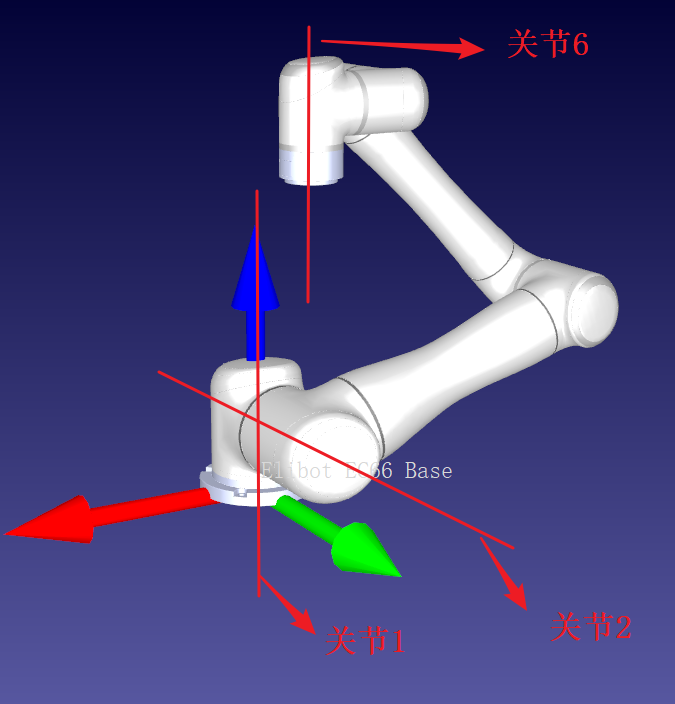
特異領域におけるロボットの典型的なポーズ:
1.手首関節特異点:ロボット関節4と関節6軸が平行
2.肘関節特異点: ロボット関節 2、関節 3、関節 4 軸が同一平面上にある
3.ショルダー ジョイントの特異点: ロボット エンド フランジの中心点はジョイント 1 とジョイント 2 によって形成される平面にある。
したがって、使用する際には次の点に注意してください。
(1) 軌道を計画するときは、特異領域を避けてください。
(2) エンドフィクスチャを小さな角度で取り付けて、特異領域に入る可能性を減らします。






