艾利特EC机器人支持使用基恩士PLC, 本文将以通过EtherNet/IP方式、KV-8000为例。
通过USB
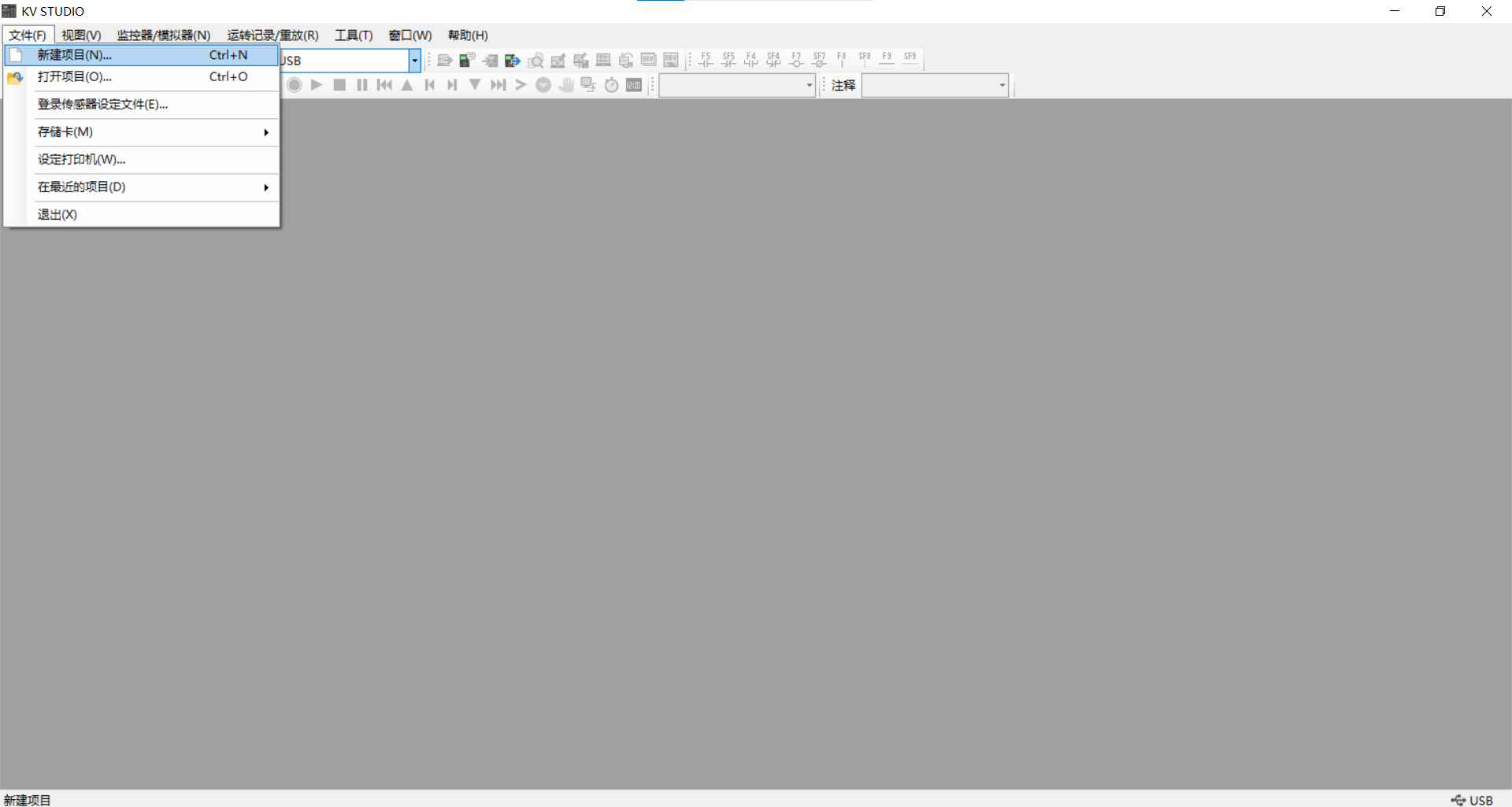
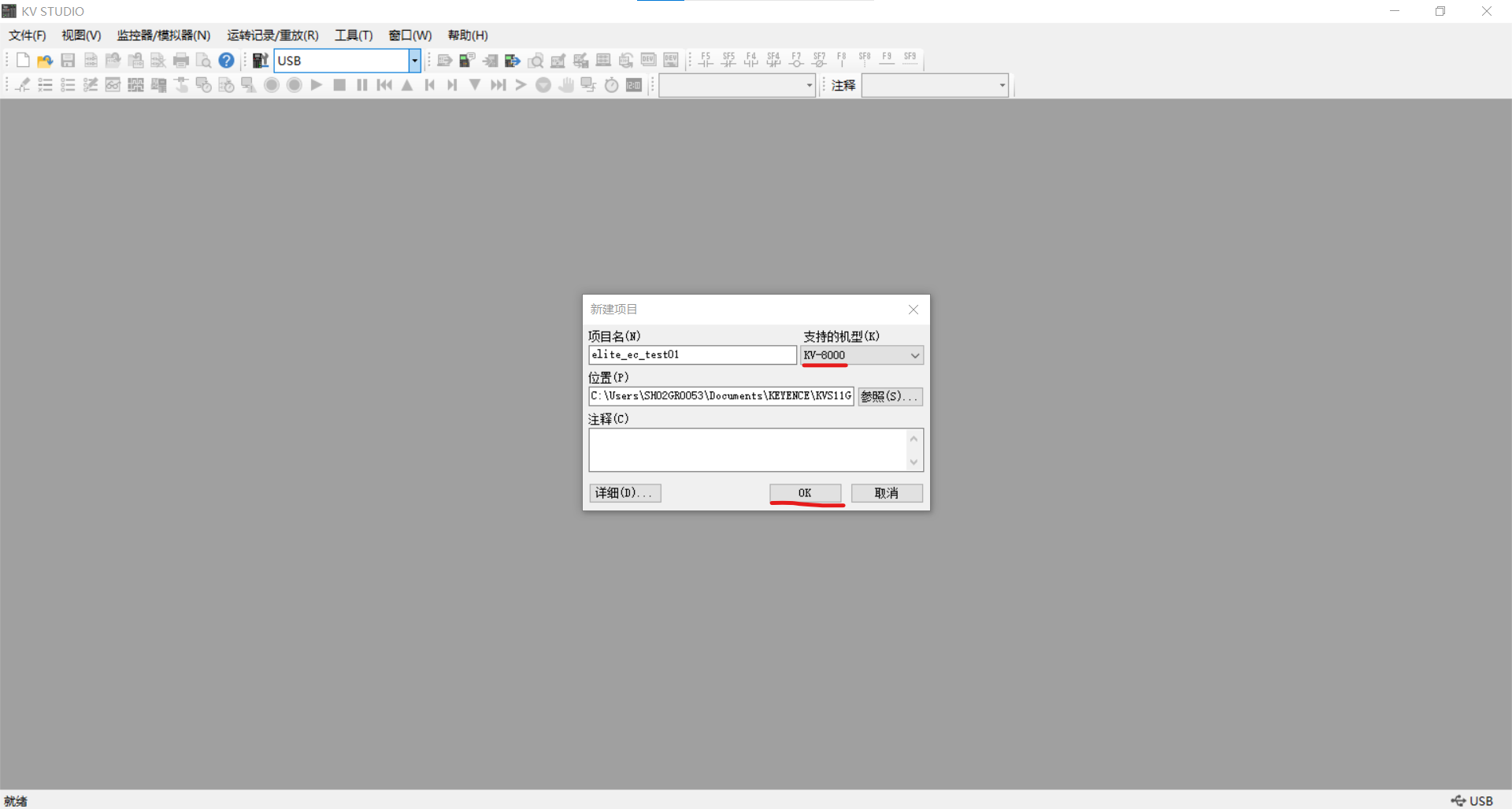
打开所使用的基恩士PLC对应的软件,由于本例中使用USB线连接,上方通信方式选择USB。点击左上角“文件”-“新建项目”,命名项目,请注意“支持的机型”需与实际使用设备一致。
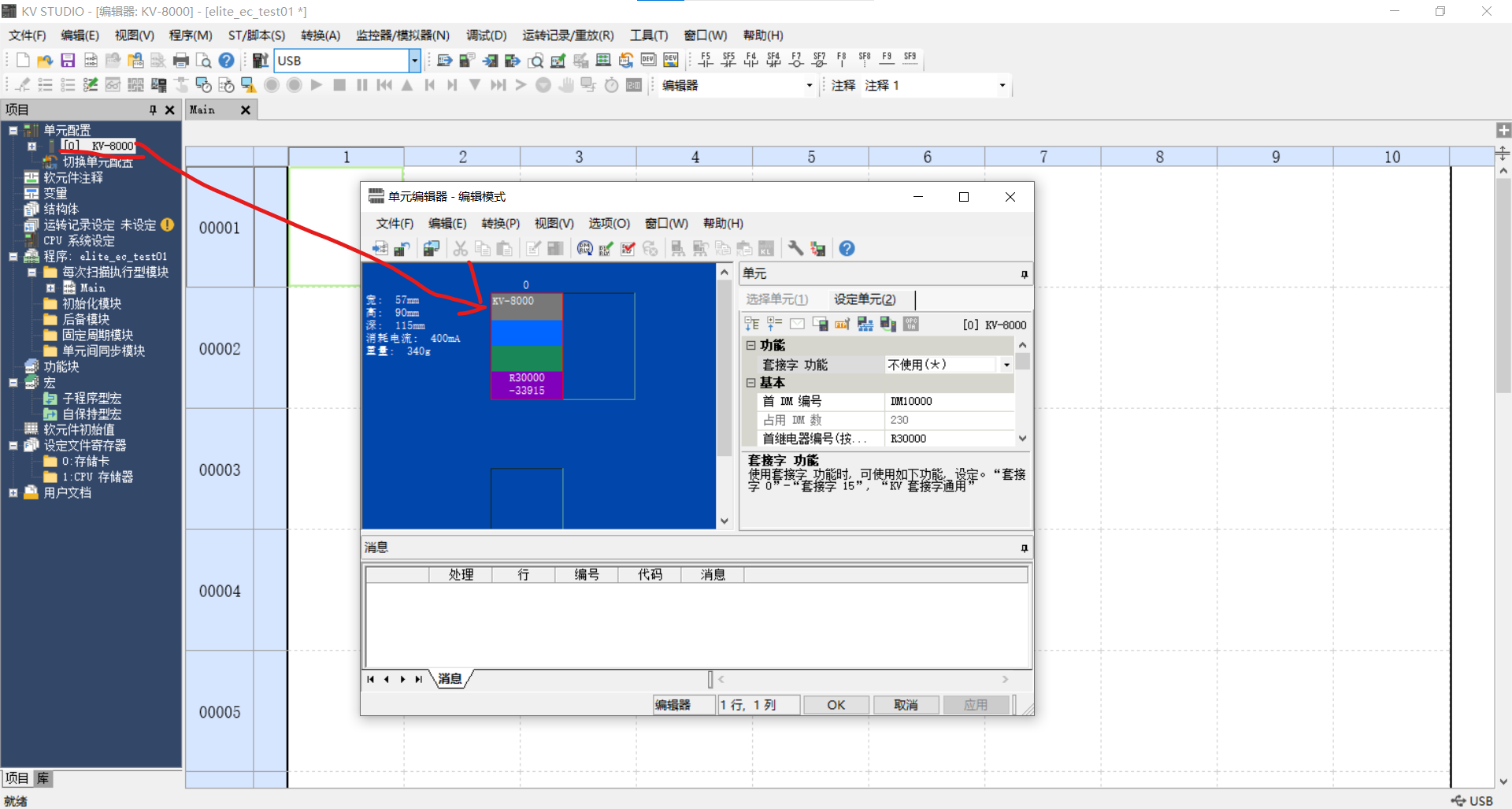
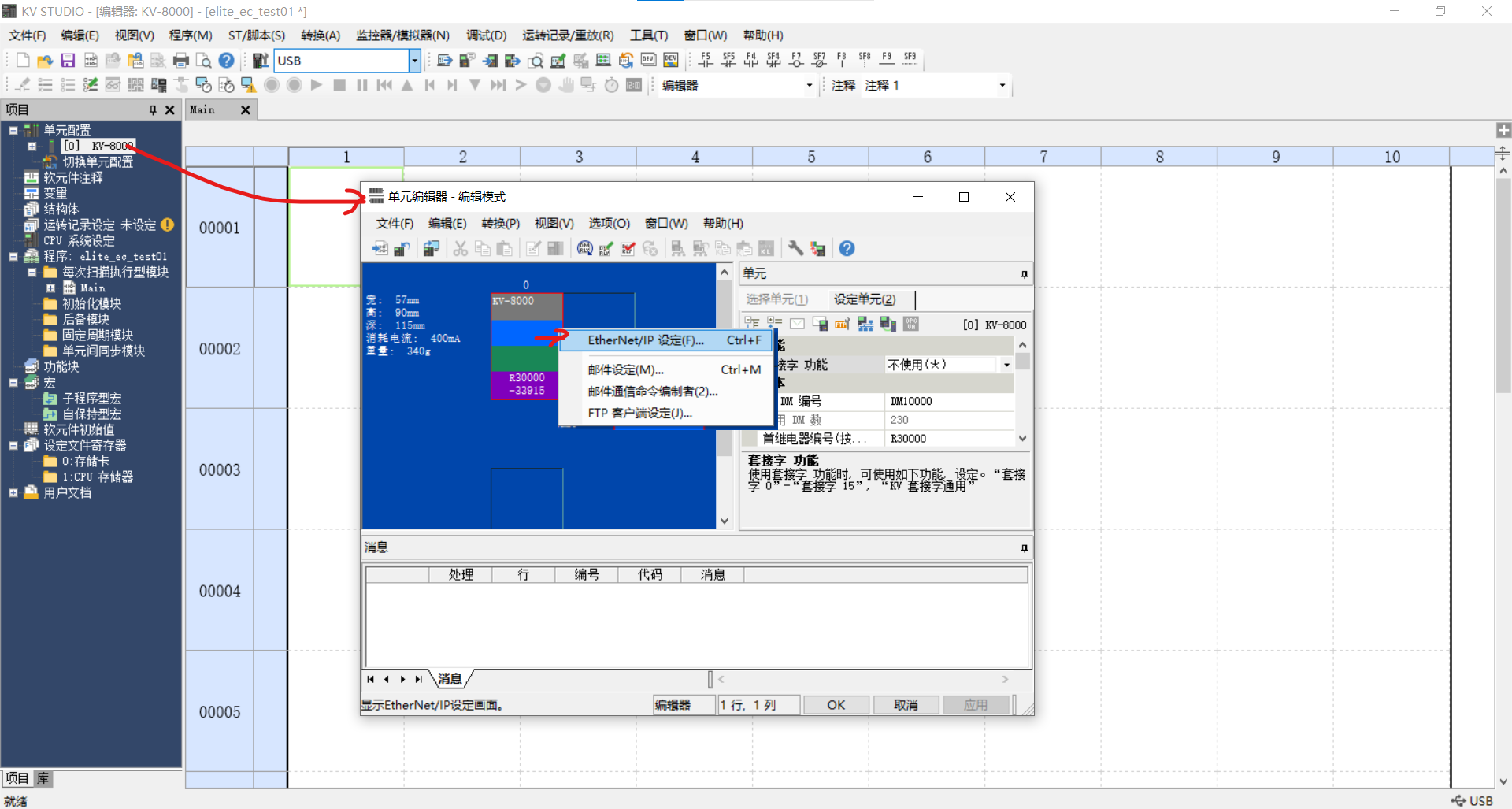
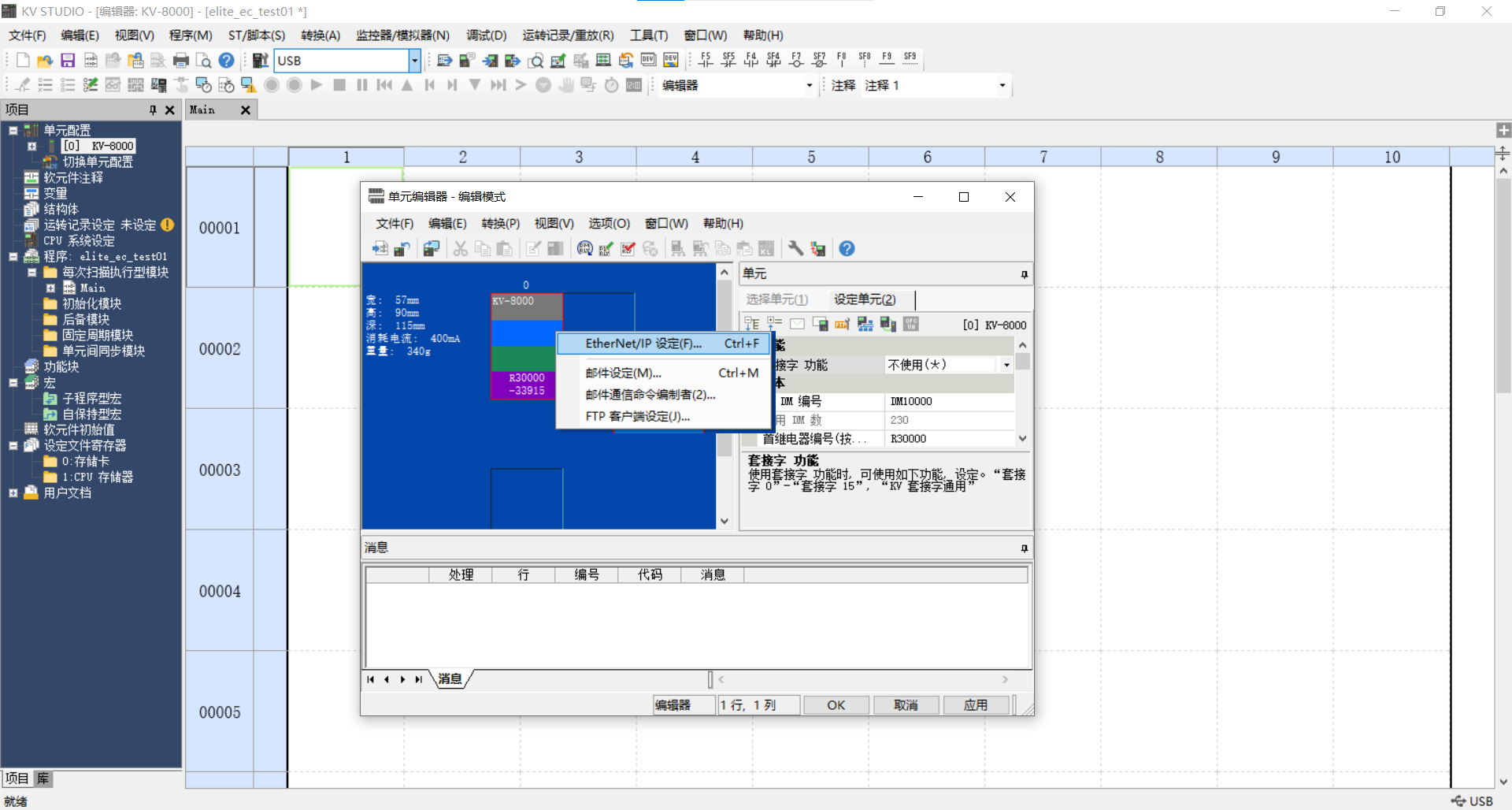
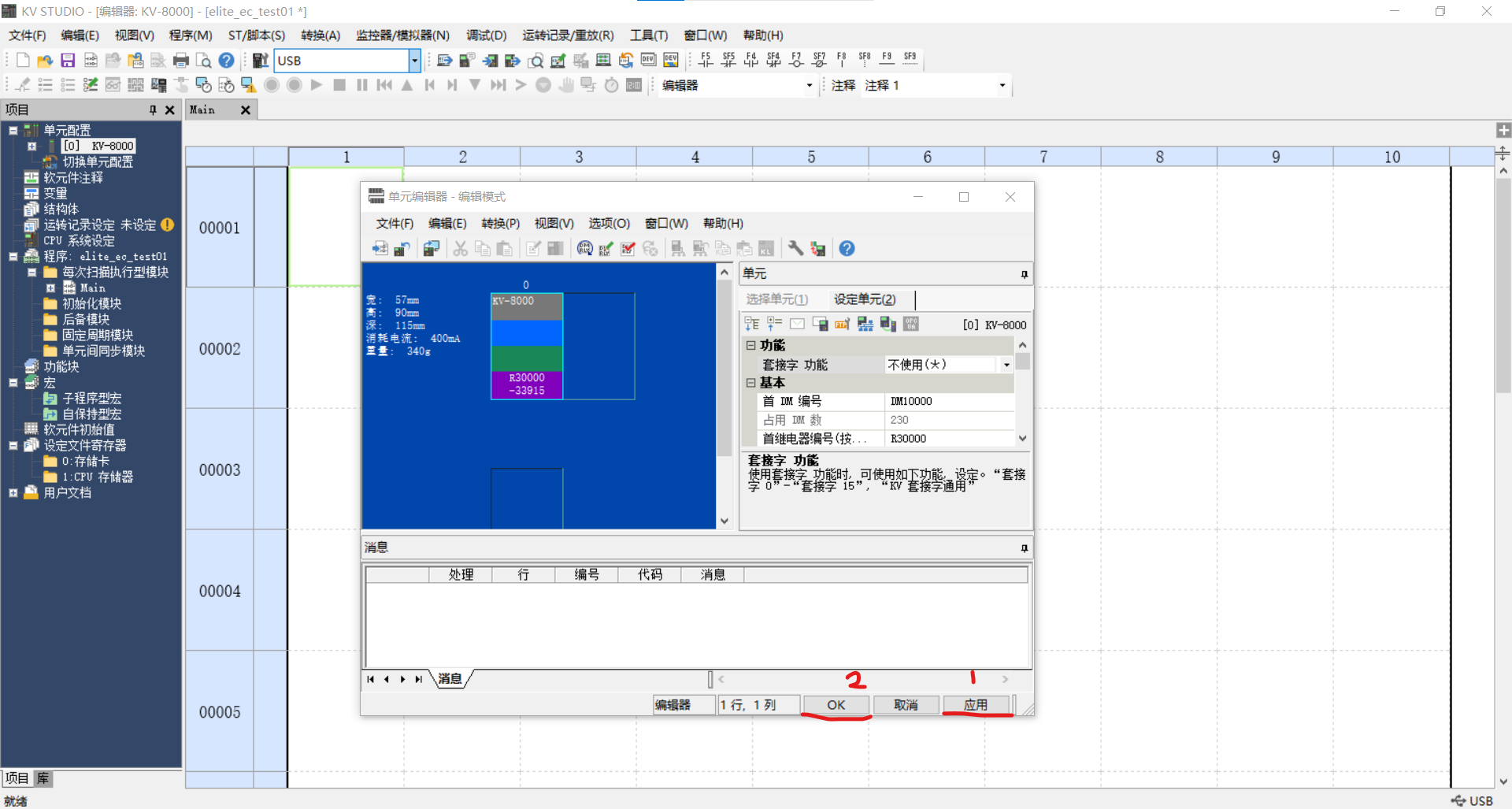
进入项目界面后,左侧自动出现“项目”列表,点击“单元配置”,选择刚才新建项目时选的设备,出现窗口“单元编辑器”,可以看到设备模块,例如此处KV-8000,右键点击,选择“EtherNet/IP”。
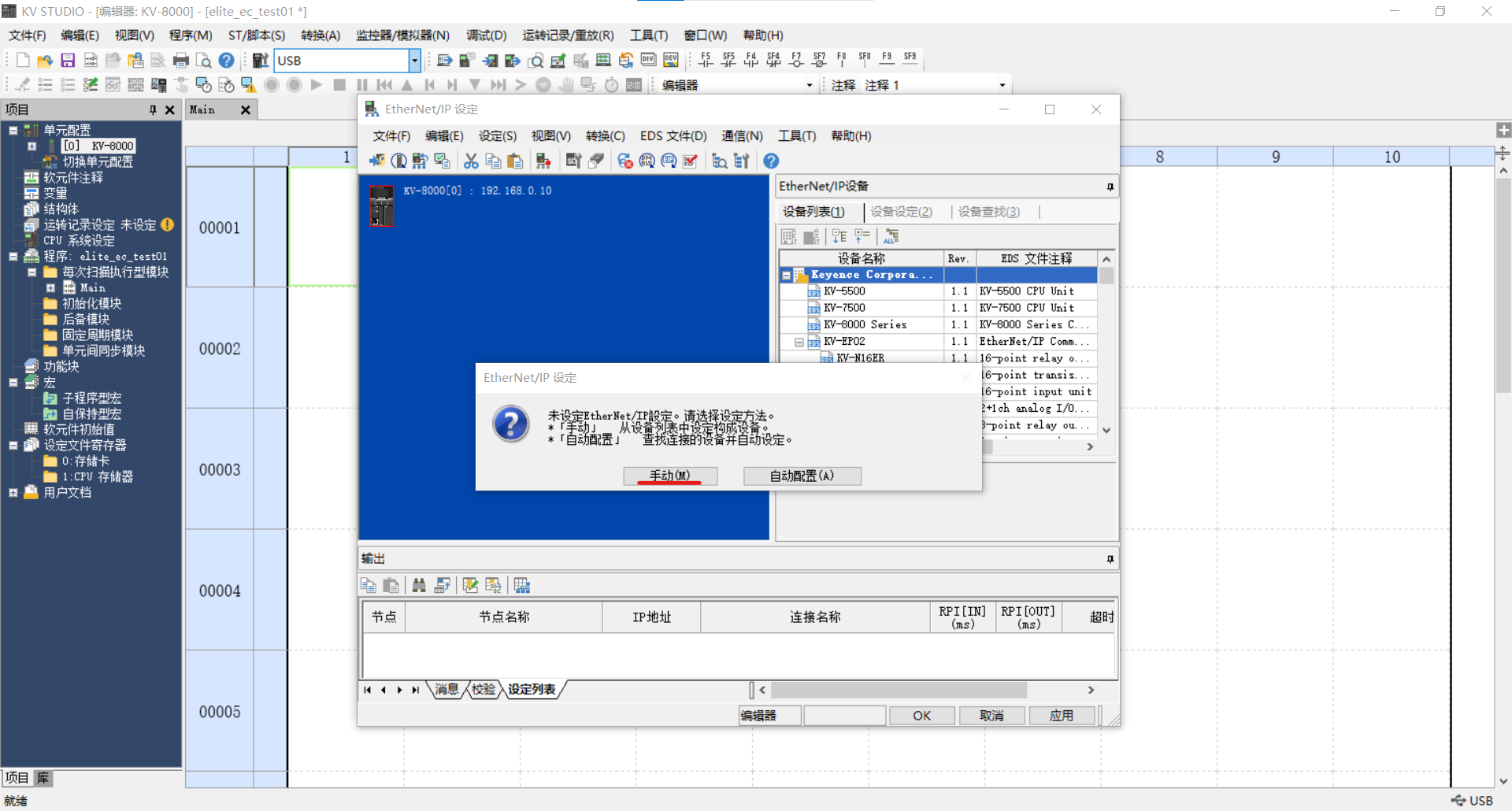
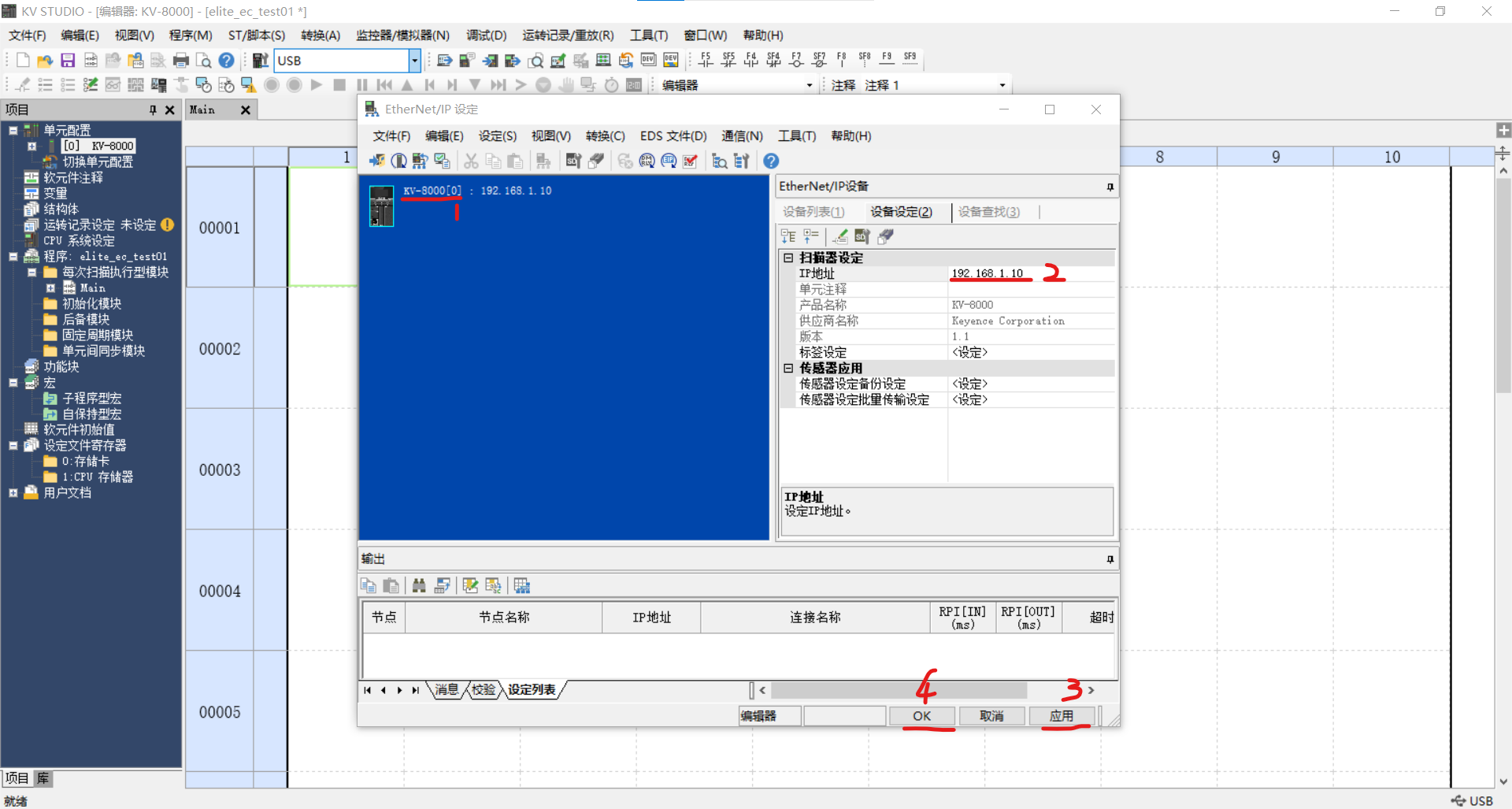
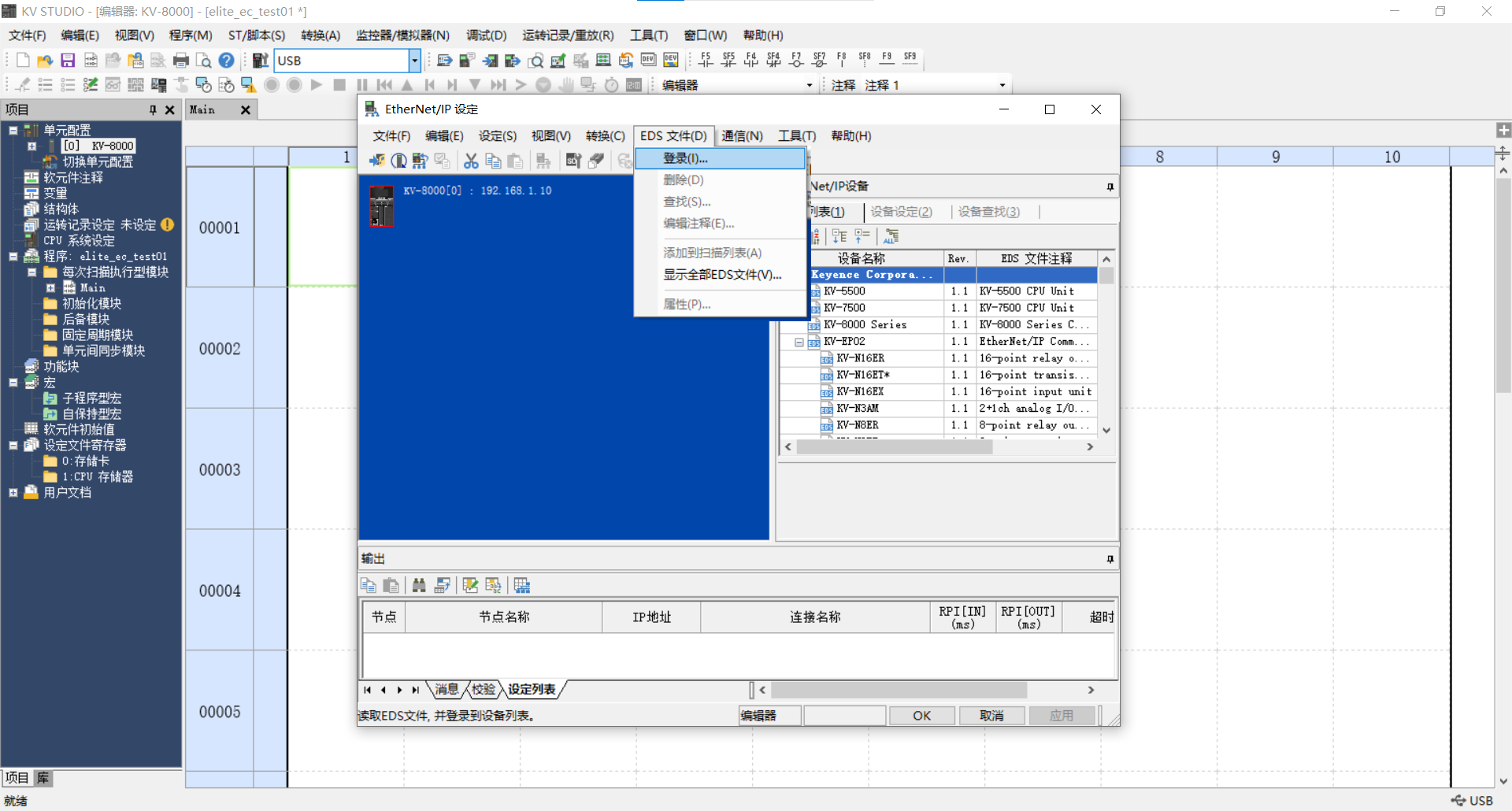
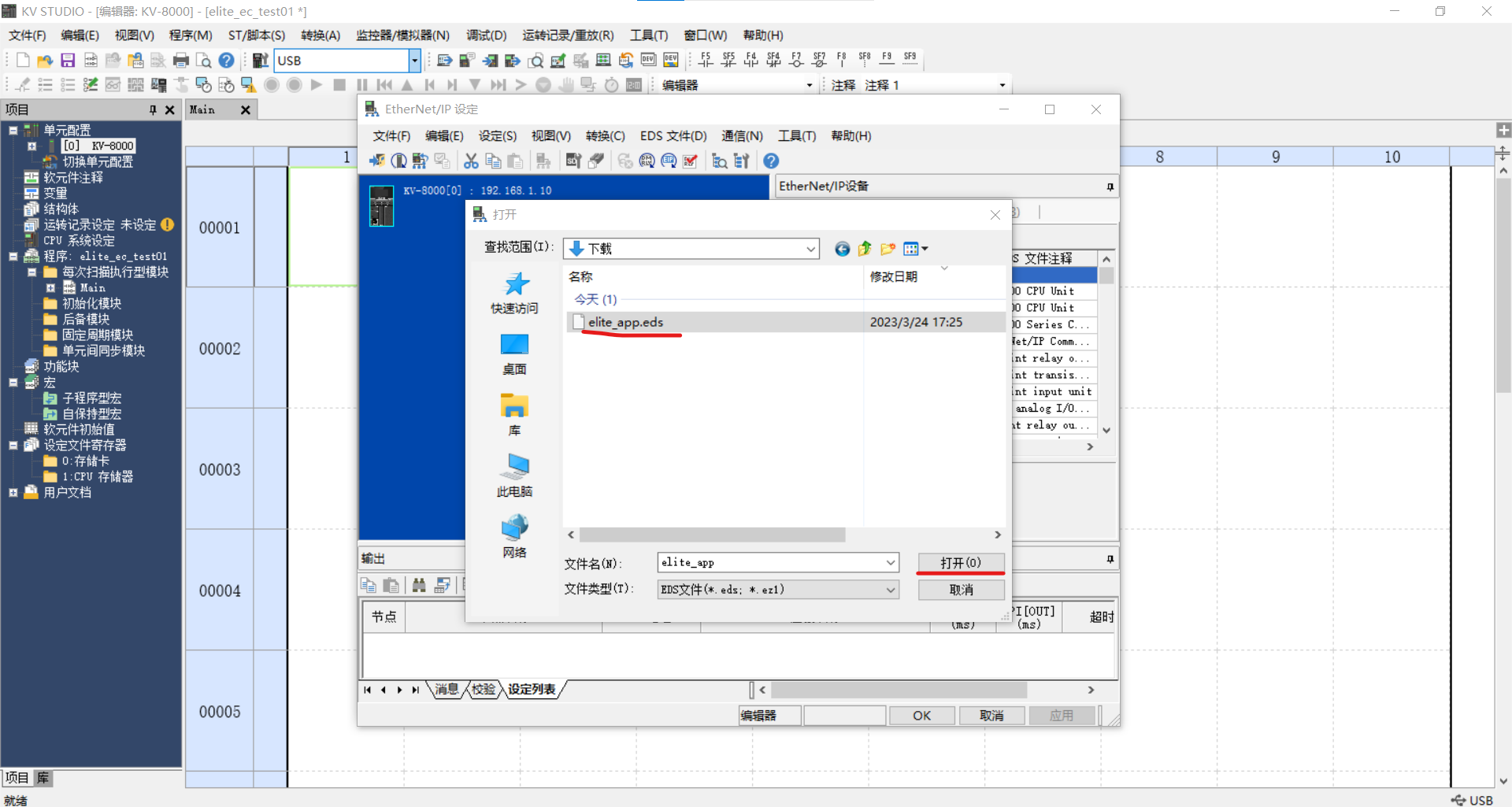
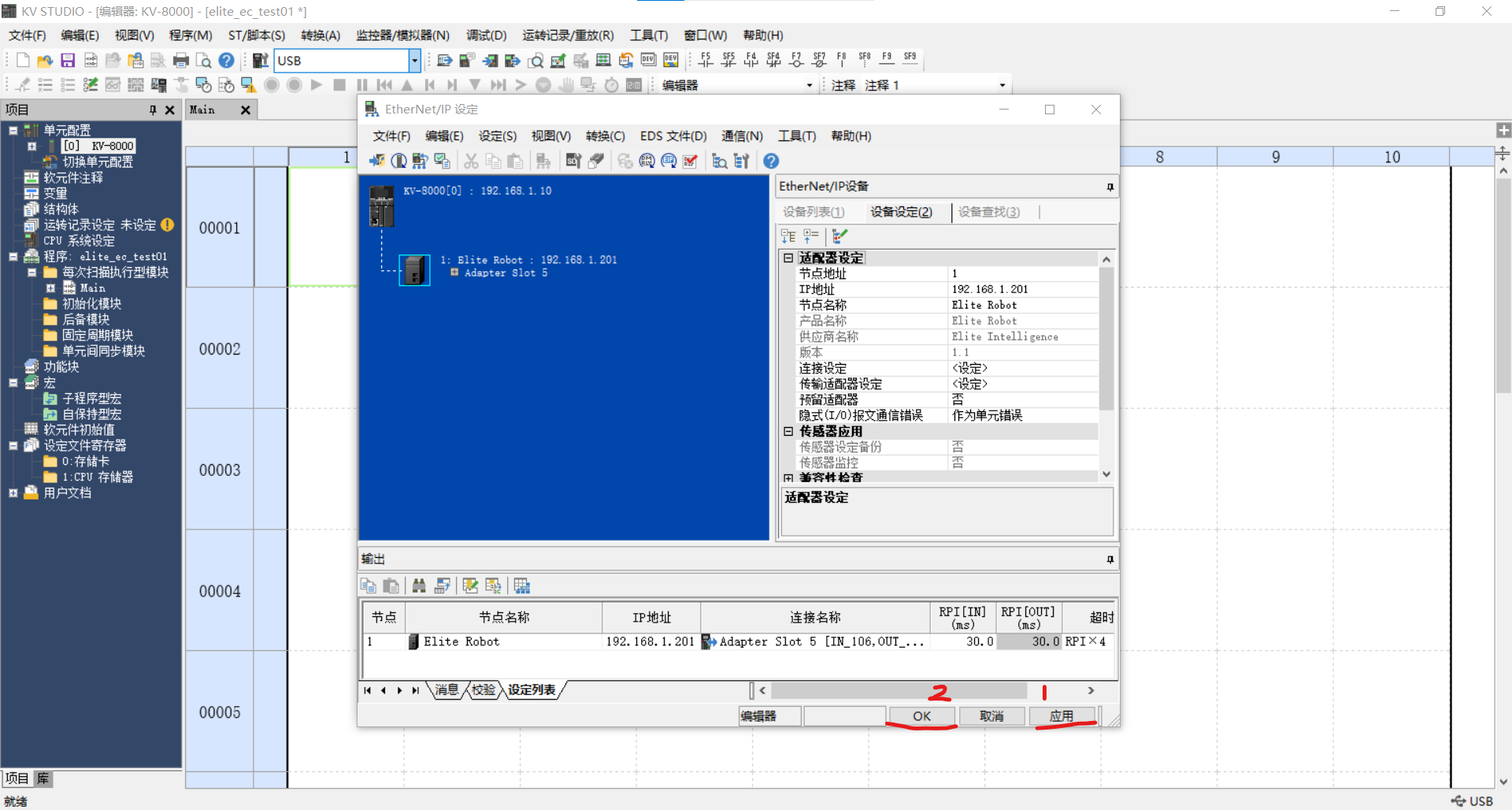
弹出EtherNet/IP 设定窗口后,选择“手动”,点击左侧的“KV-8000”,在右侧将IP地址设置为PLC的IP地址(需与机器人为同一网段),更改完成后点击“应用”,再点击“OK”。再次右键点击设备再次打开“EtherNet/IP设定”,在上方菜单栏中选择 “eds文件”-“登录”,找到本地的艾利特机器人EC系列eds文件(可在官网下载),点击“打开”。右侧“设备名称”列表自动出现Elite Robot,将其拖动添加至左侧PLC下。
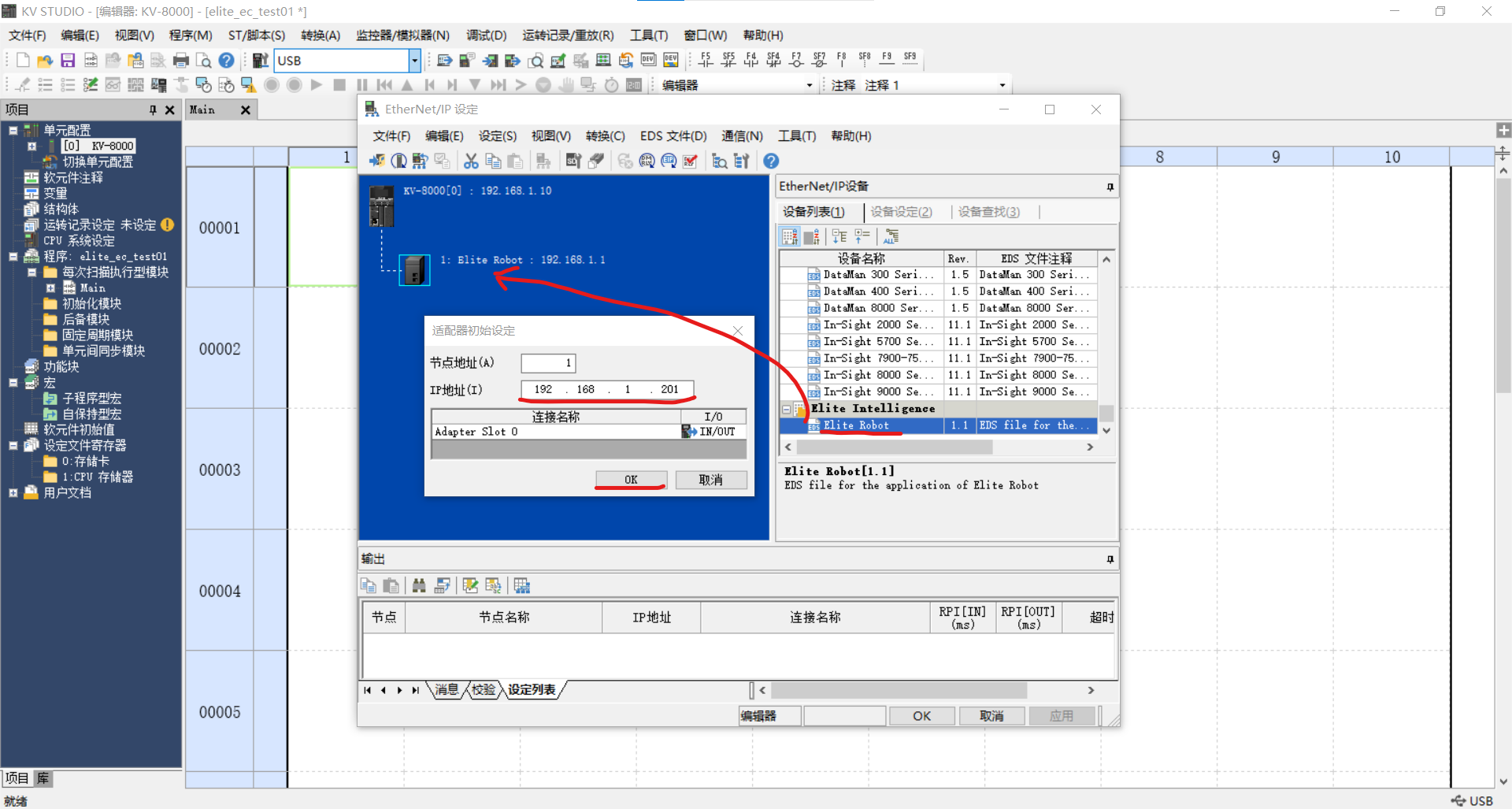
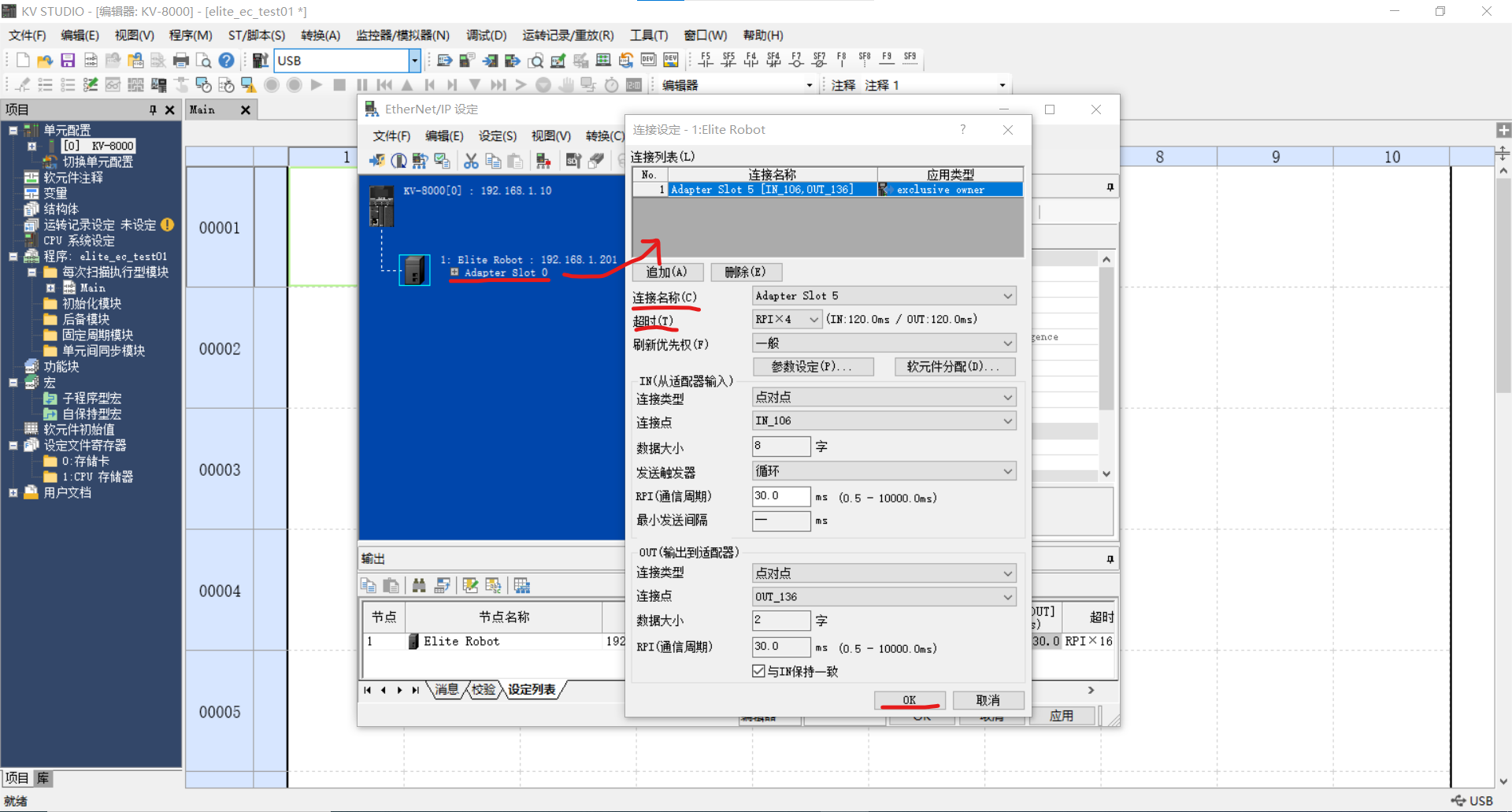
点击刚才添加到左侧的机器人,跳出“适配器初始设定”窗口,将IP地址设定实际连接的机器人IP,点击“OK”。
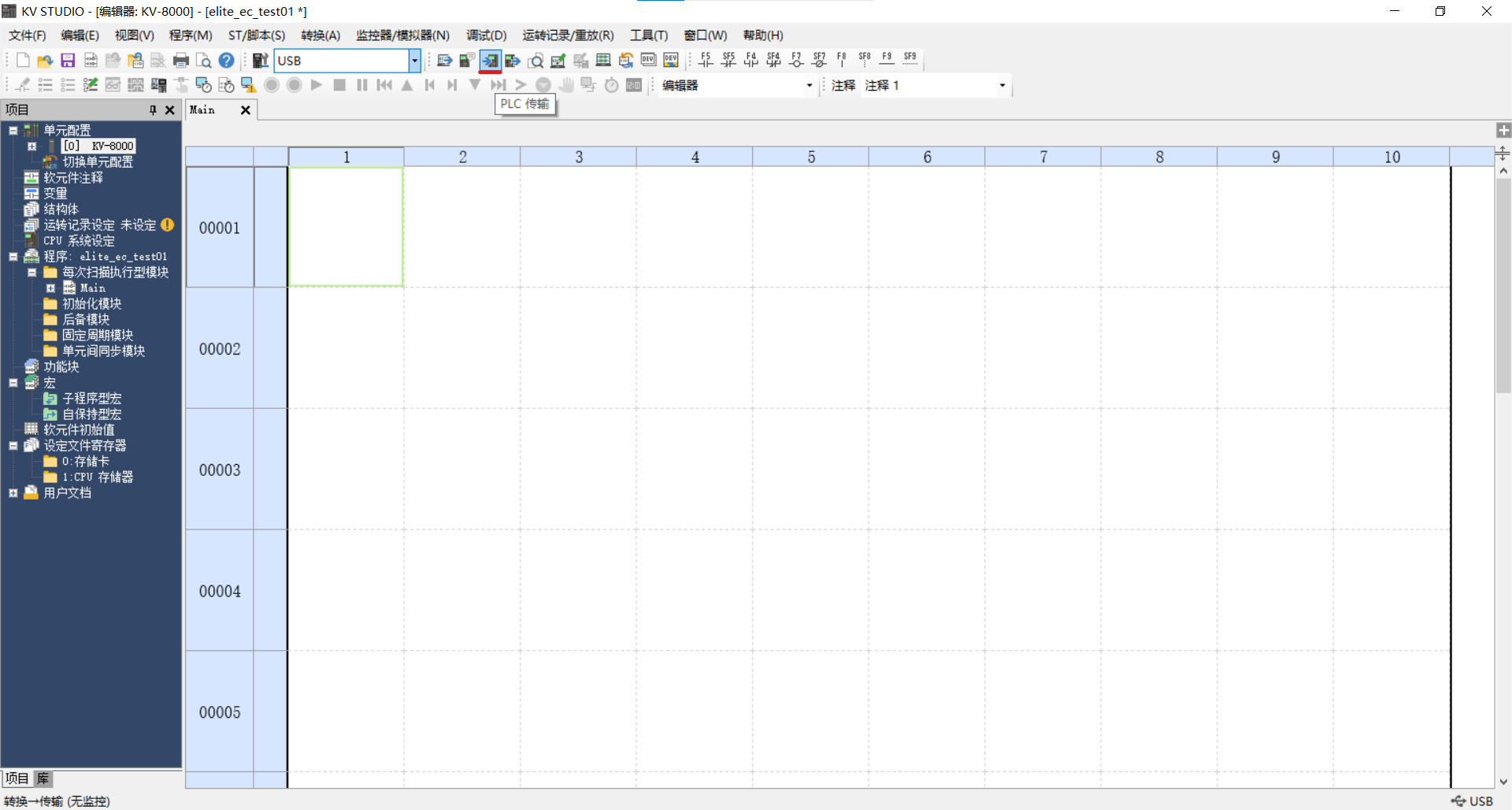
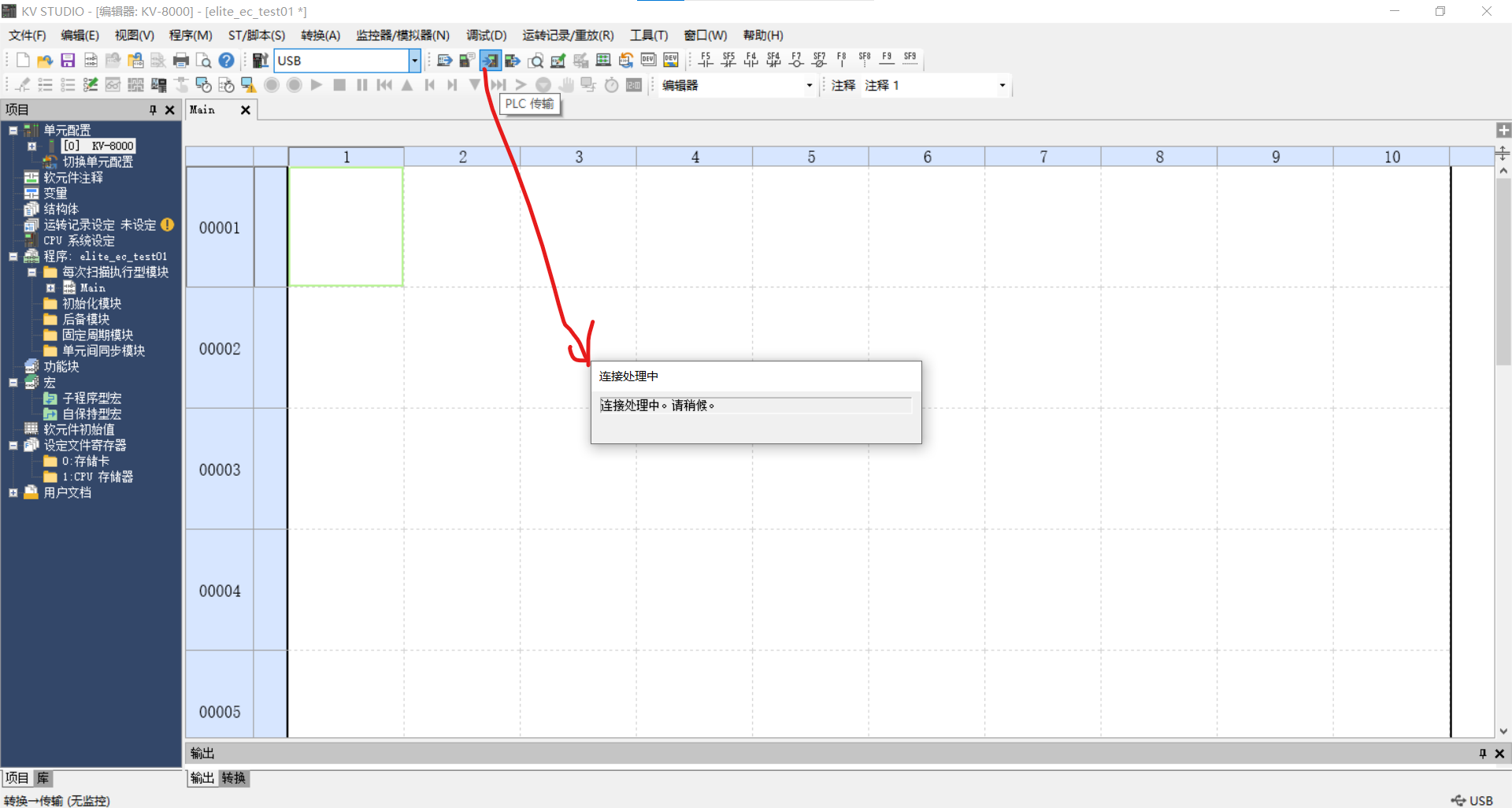
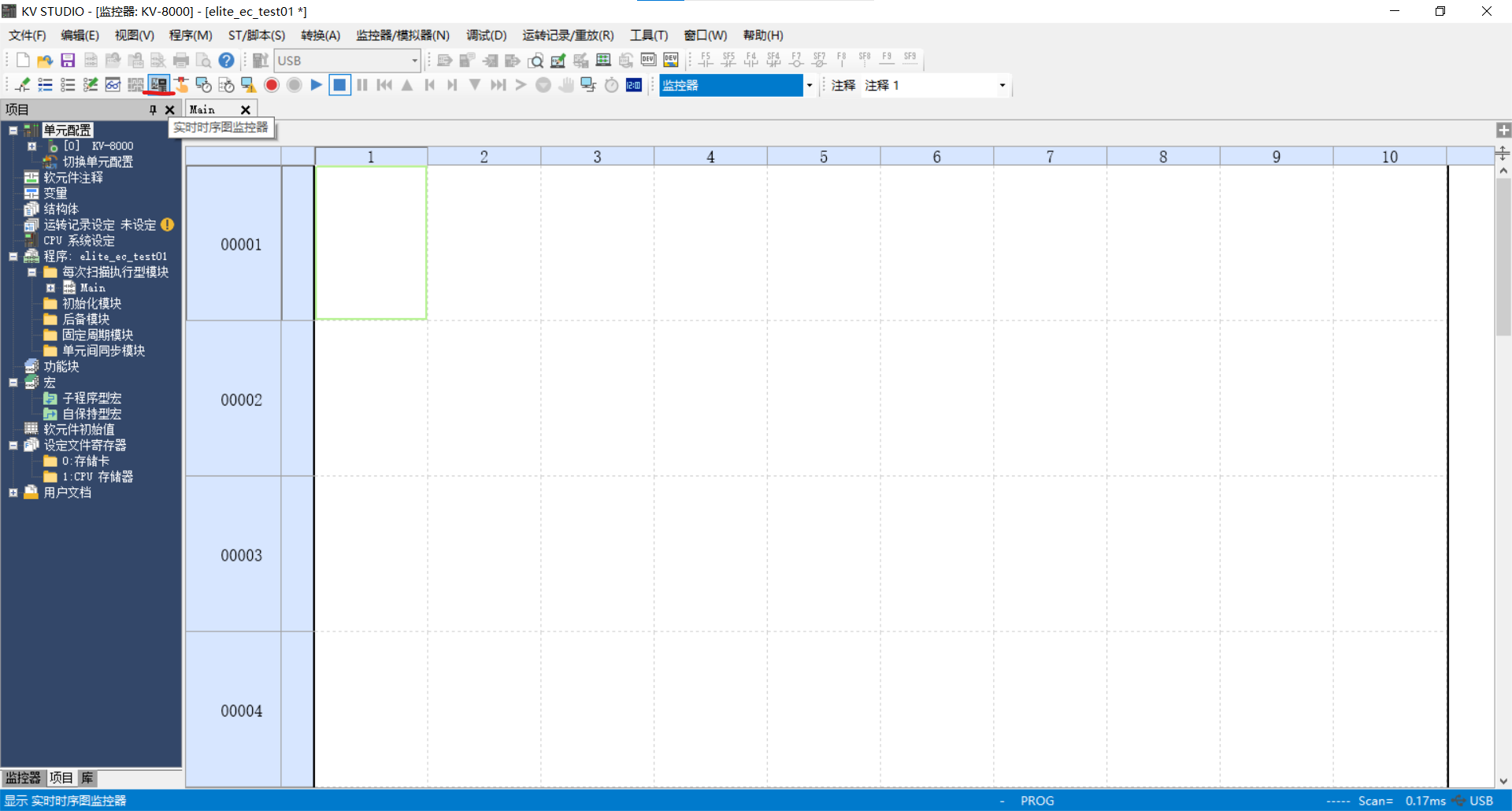
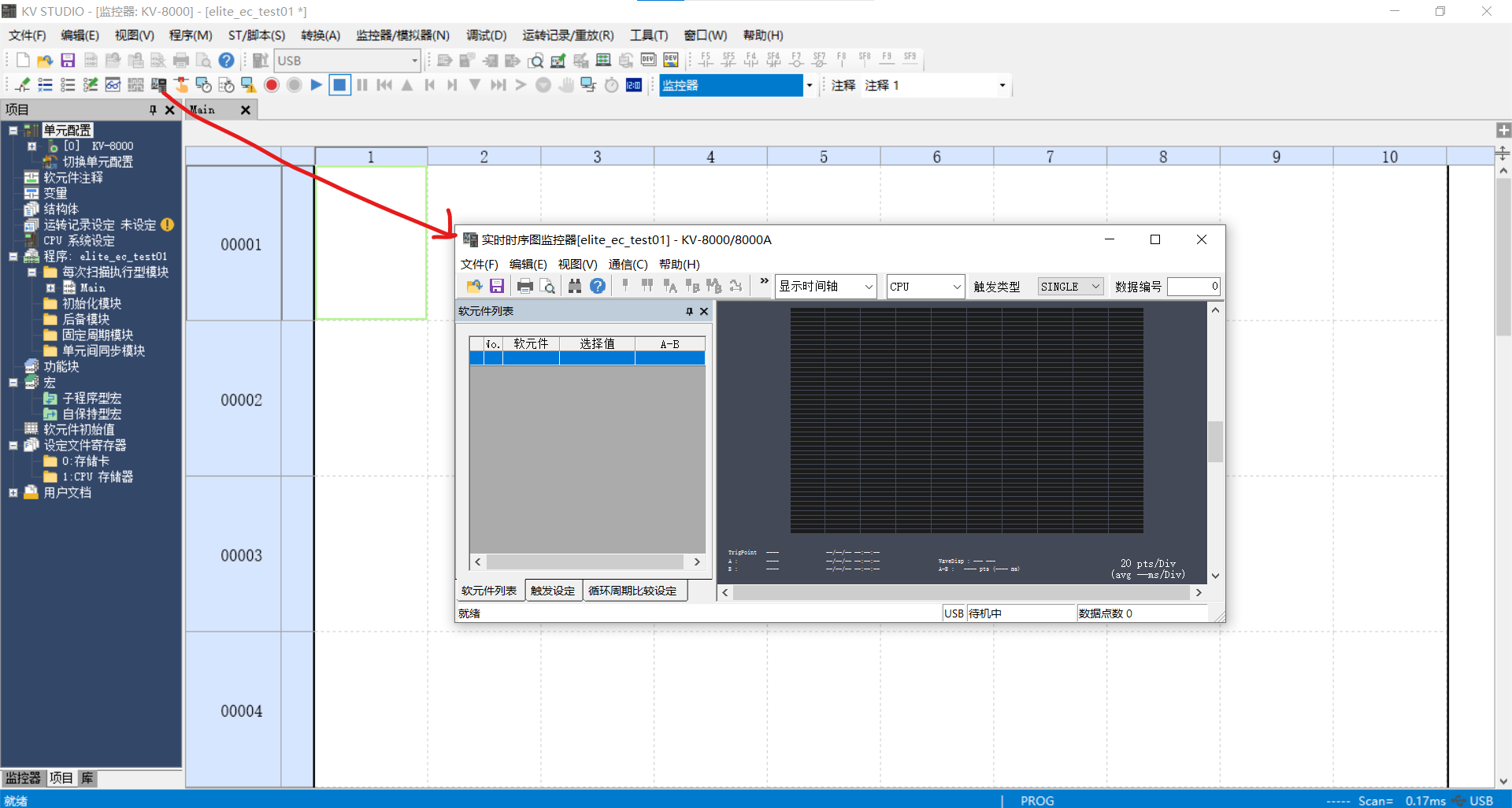
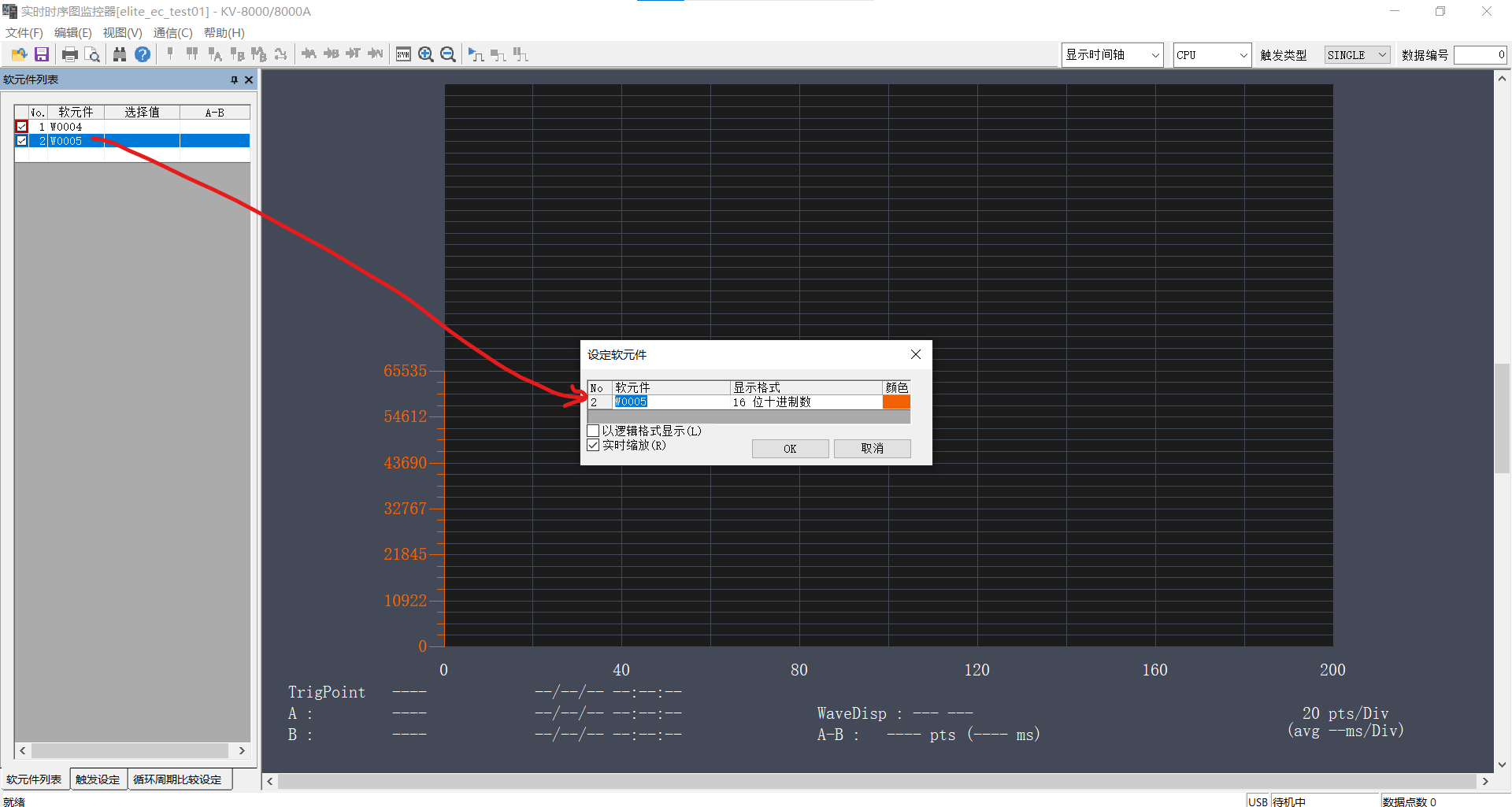
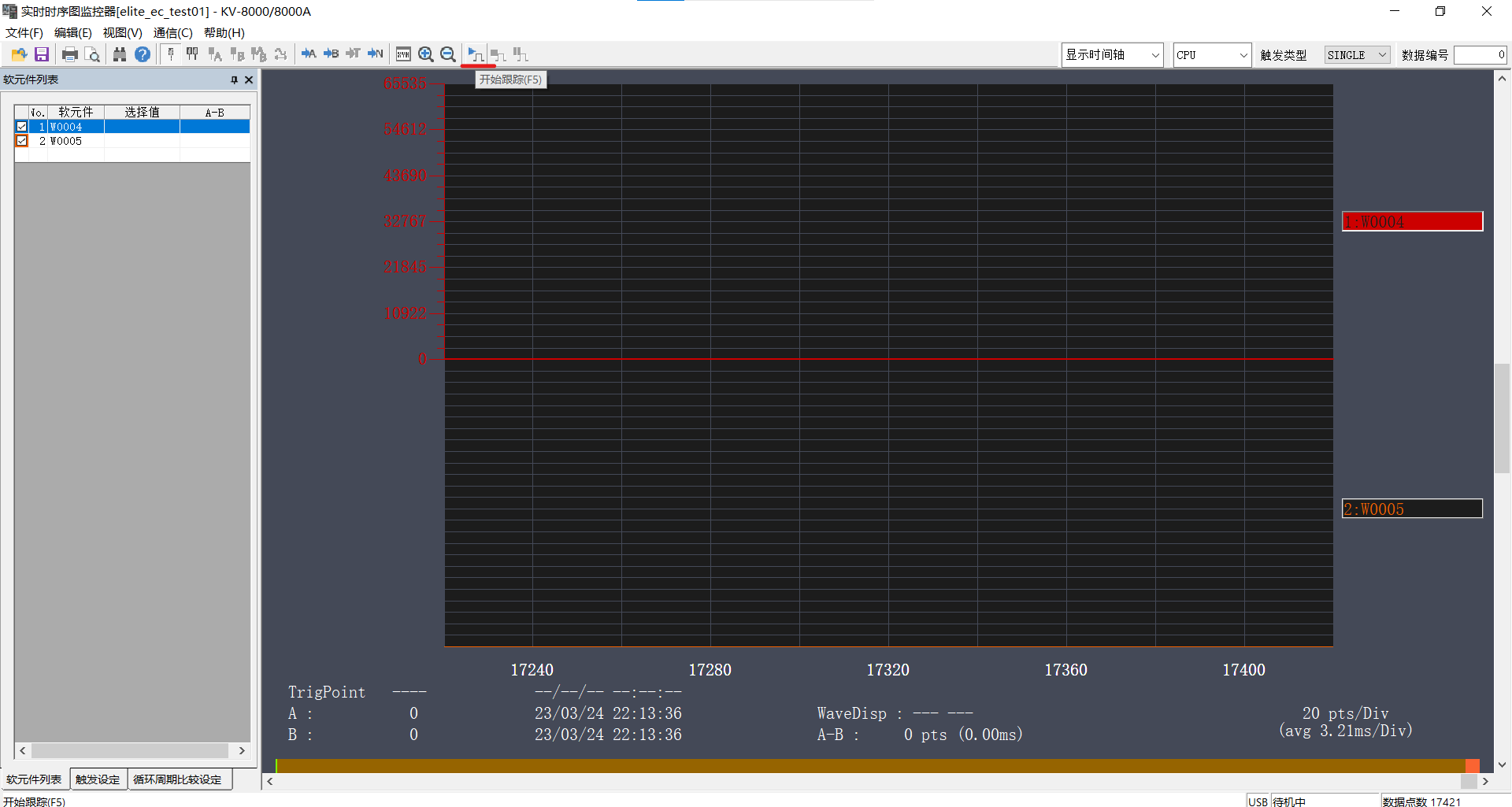
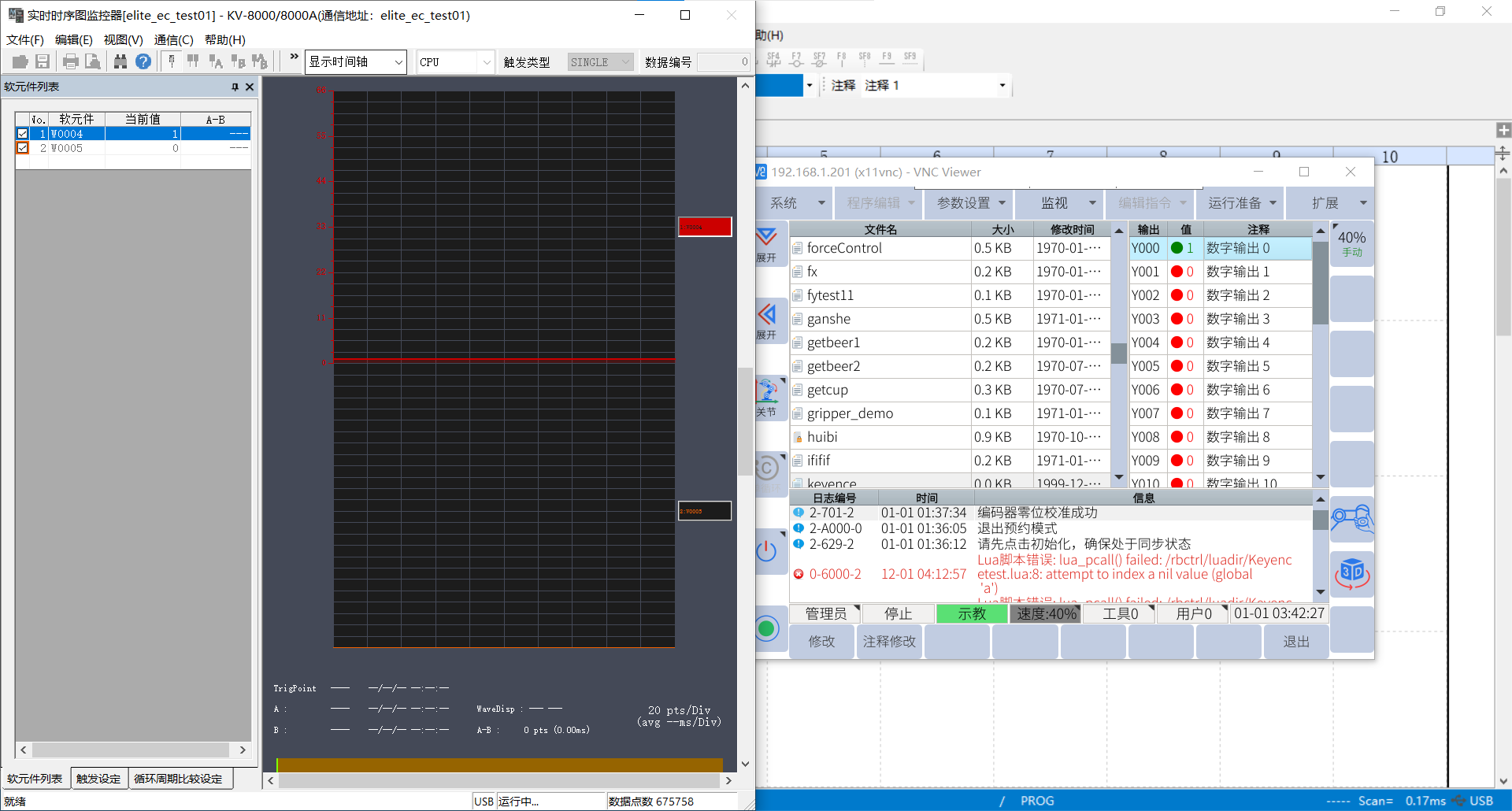
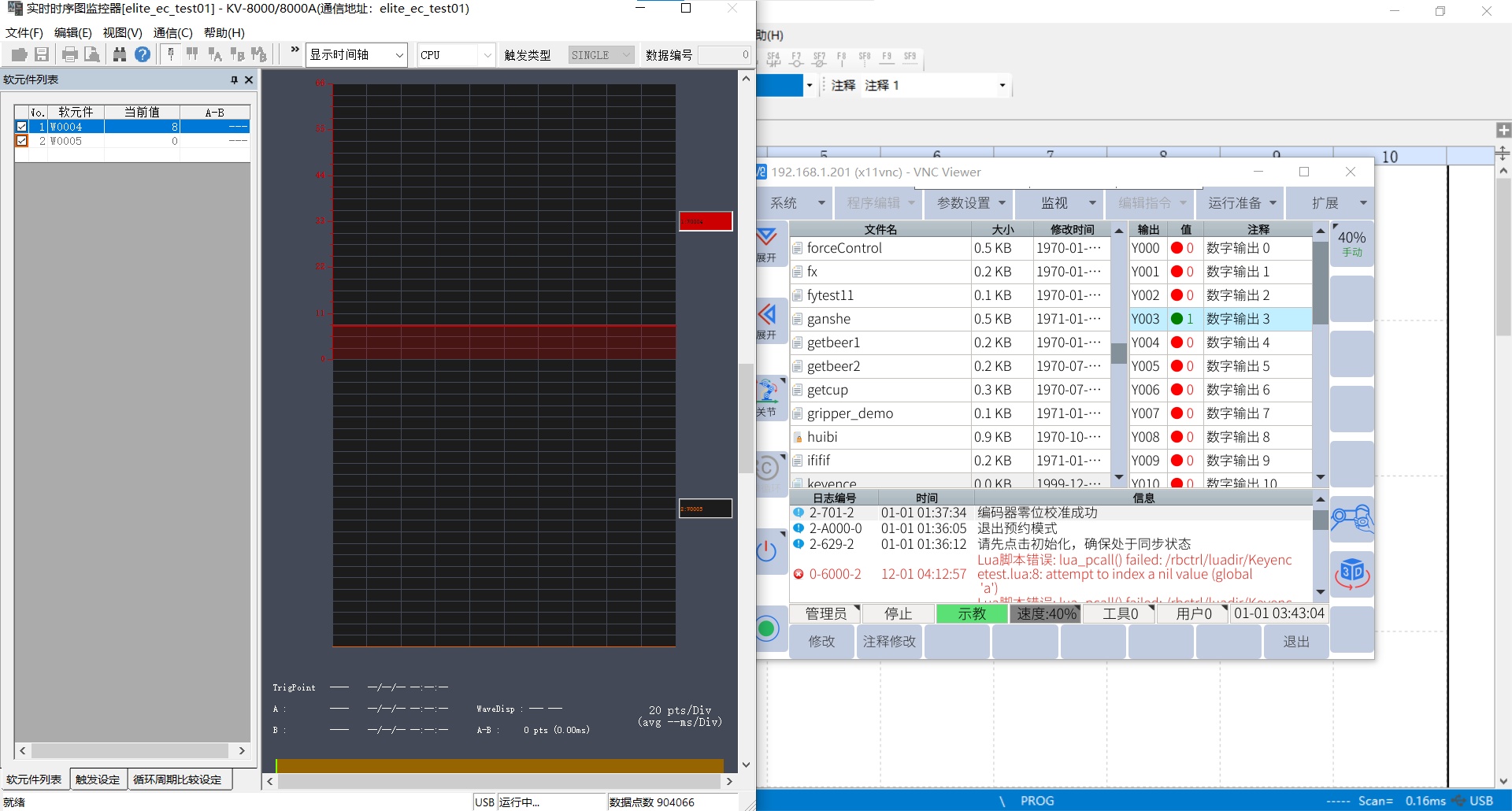
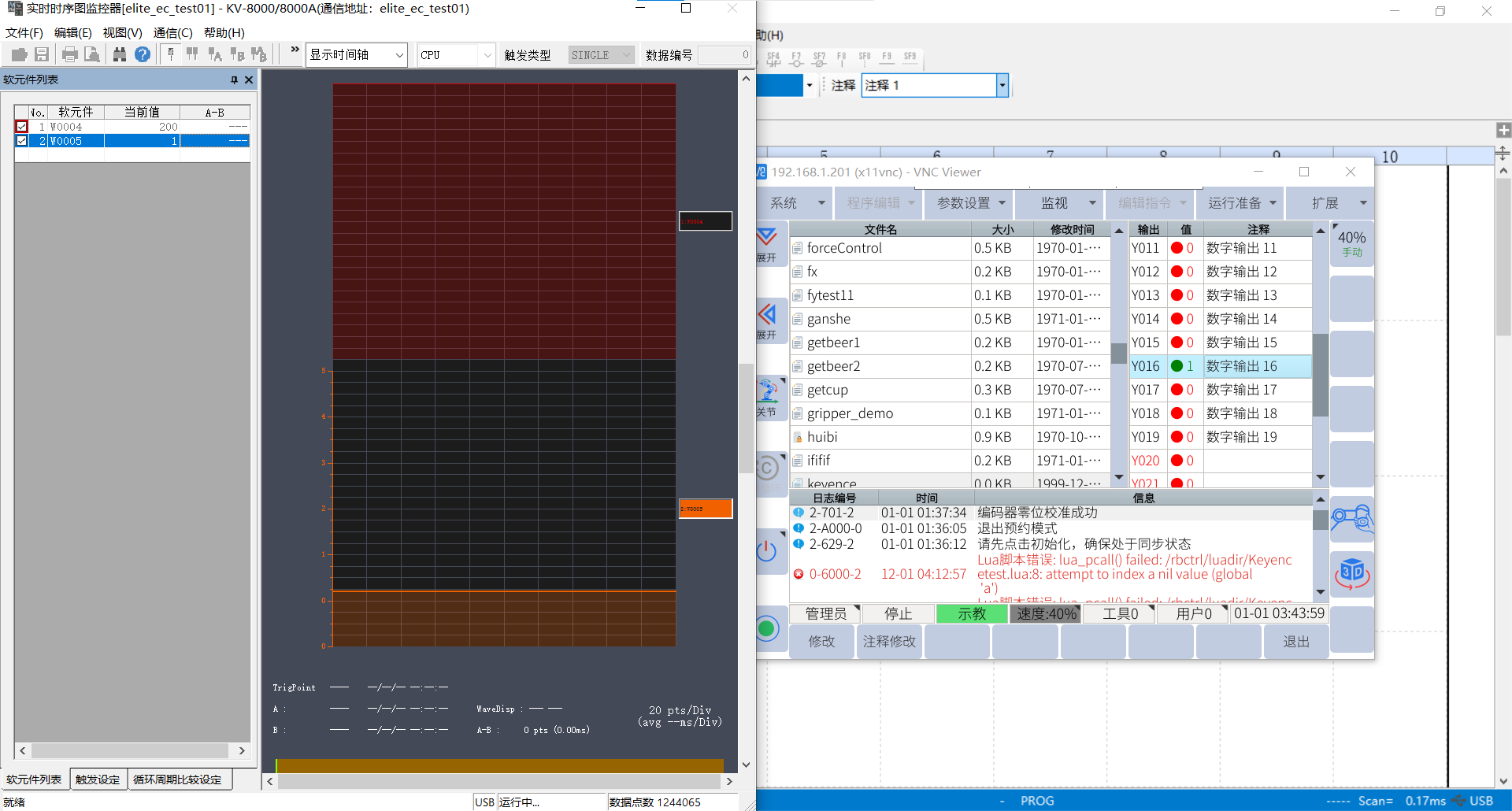
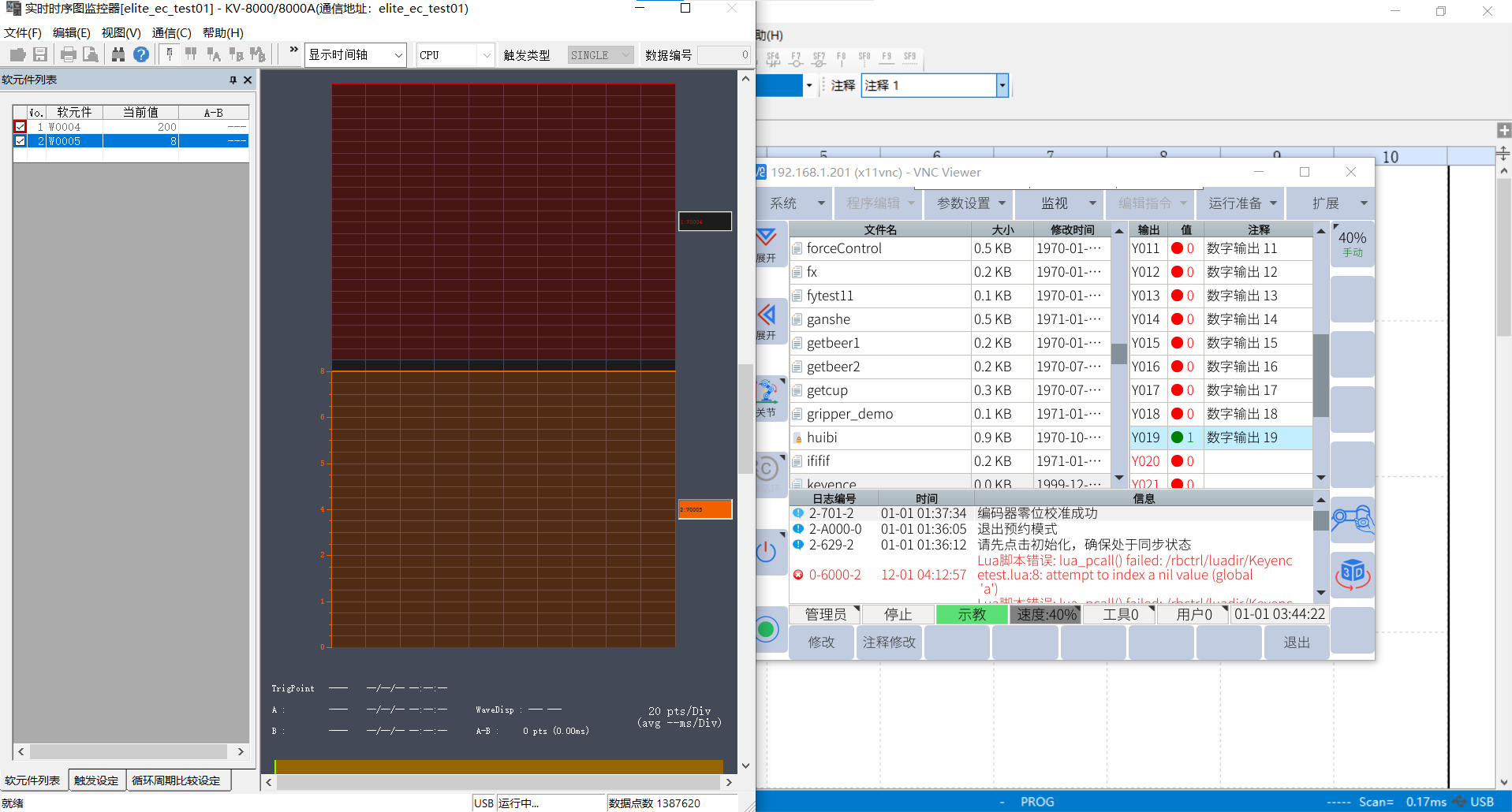
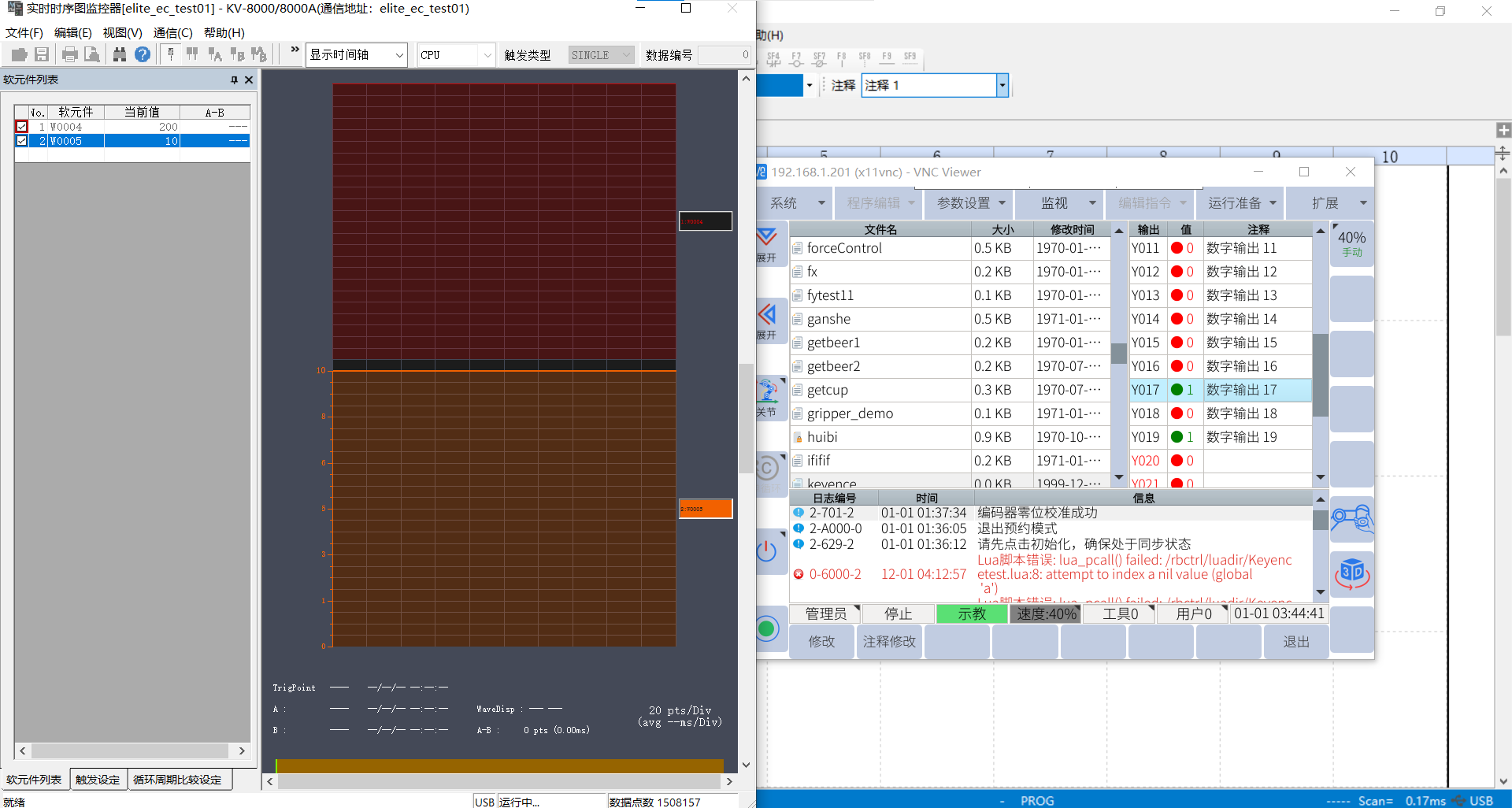
配置完成后回到主界面,点击上方“PLC传输”图标,出现“连接处理中”窗口,将模式从编辑器切换到监控器。连接成功后,点击左上“实时时序图监控器”,进入“实时时序图监控器”窗口。在左侧“软元件列表”中,双击“软元件”,在窗口“软元件设定”中,输入变量名。点击上方图标“开始追踪”,成功后左侧变量显示实时数值。