You may known that the EC series robot has a built-in palletizing process package, which can be used directly for regular-shaped palletizing. However, for irregular-shaped palletizing, when coming to the teaching points,it still needs to be manually calculated and input into the built-in process.
Now the palletizing assistant is launched. Users only need the layout method of the boxes to automatically calculate the points and import the point information into the robot. After restarting the robot, it can be used successfully.
 This article is based on the use of the built-in palletizing package of the EC series and introduces the use of the palletizing assistant. For those who are not aware of the built-in palletizing application package please refer to the video link on YouTube: https://www.youtube.com/watch?v=2SzMjK20_Cw
This article is based on the use of the built-in palletizing package of the EC series and introduces the use of the palletizing assistant. For those who are not aware of the built-in palletizing application package please refer to the video link on YouTube: https://www.youtube.com/watch?v=2SzMjK20_Cw
So how it works?
First,
Please download the PalletAssistant.exe via this link:
double click the app and to config the palletizing, follow the steps as below:
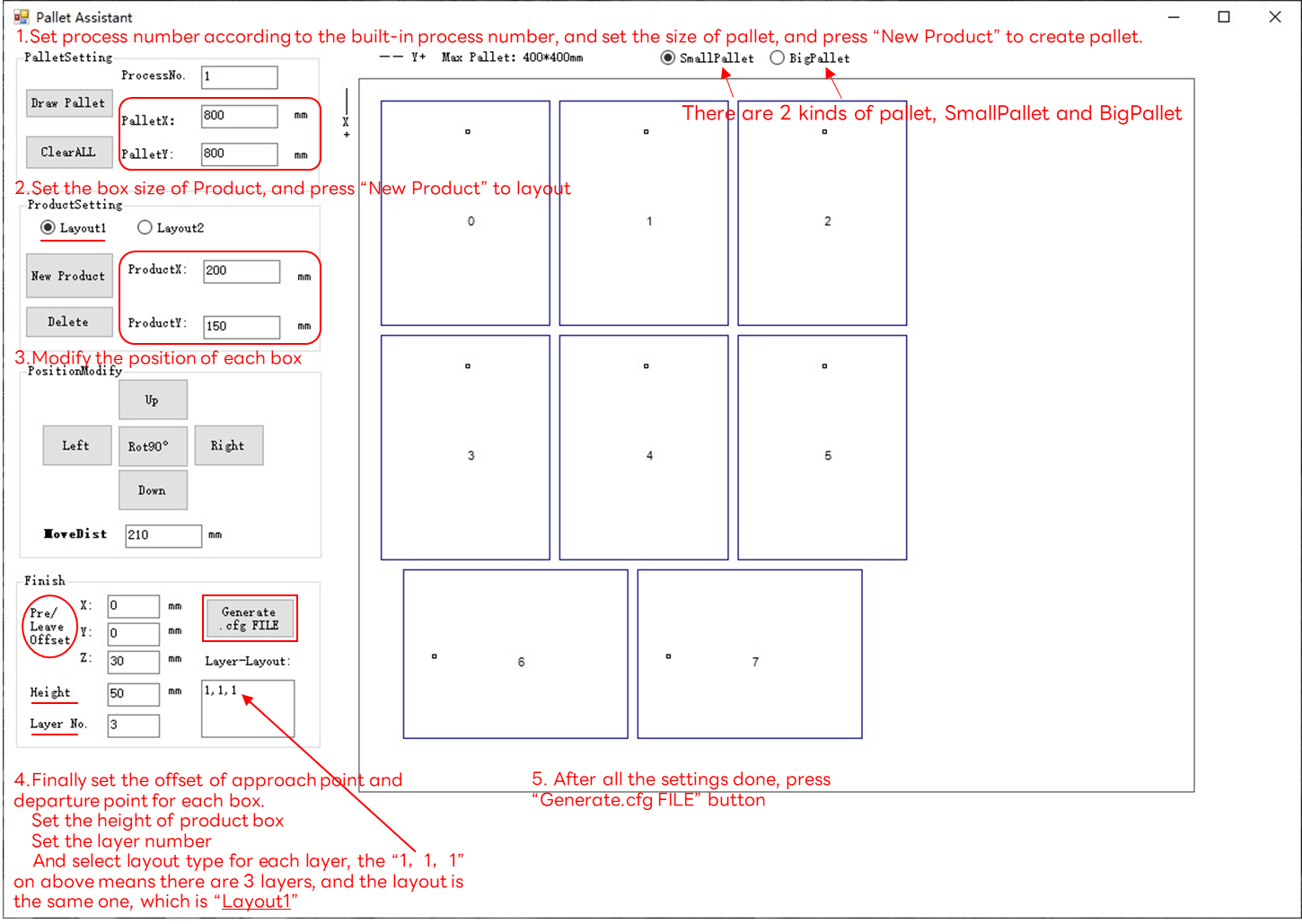
Additional explanation for PalletAssistant.exe:
Second,
After generating the configuration file, import it into the robot. If there is a file with the same name at this time, the original file will be overwritten.Please check this link https://bbs.elibot.cn/forum/detail/topic/73.html
to learn how to import the files with Notepad++, just like figure below:

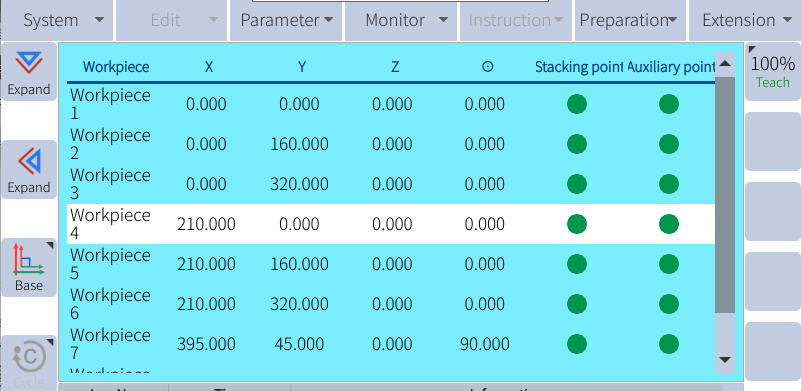
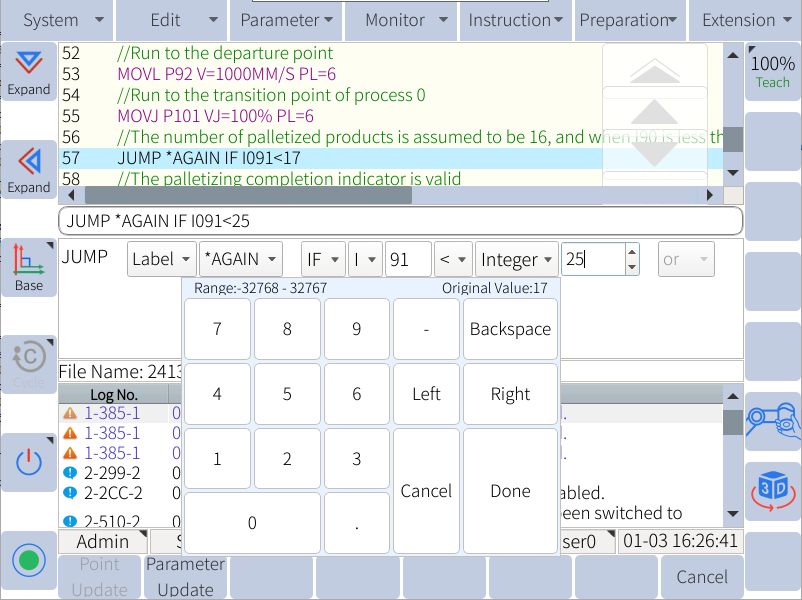
Third, before restarting the robot, please confirm whether the total number of product boxes to be palletized is correct. The global variable I09x is the counting parameter for pallet process, ang the value of the "x" is accoeding to the process numbre. For process No.0, then the counting parameter is I090. More details please check our Palletizing Manual link:
If not, please change it in the position below.
Last, don't forget to restart the robot and run the program with lower speed.
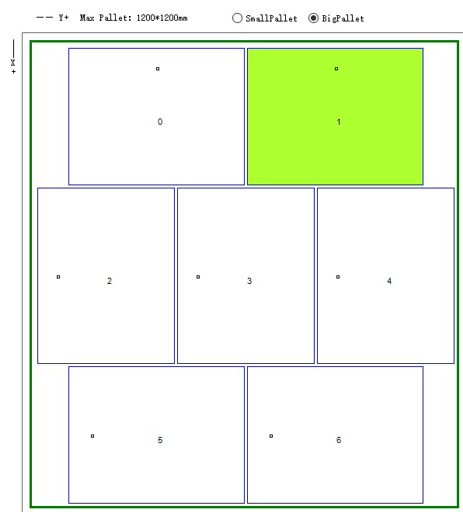
(You will find the position has been changed at the "Custom Layout"