
Click the Google Drive link to download:https://drive.google.com/drive/folders/16t66uWPbNO2fL7kaclgVWw0AQ1AIe_PX
Open the folder that saved all these RTSI sample file, and right click to run them in the Terminal or PowerShell, you will get the continuously data.
Examples:
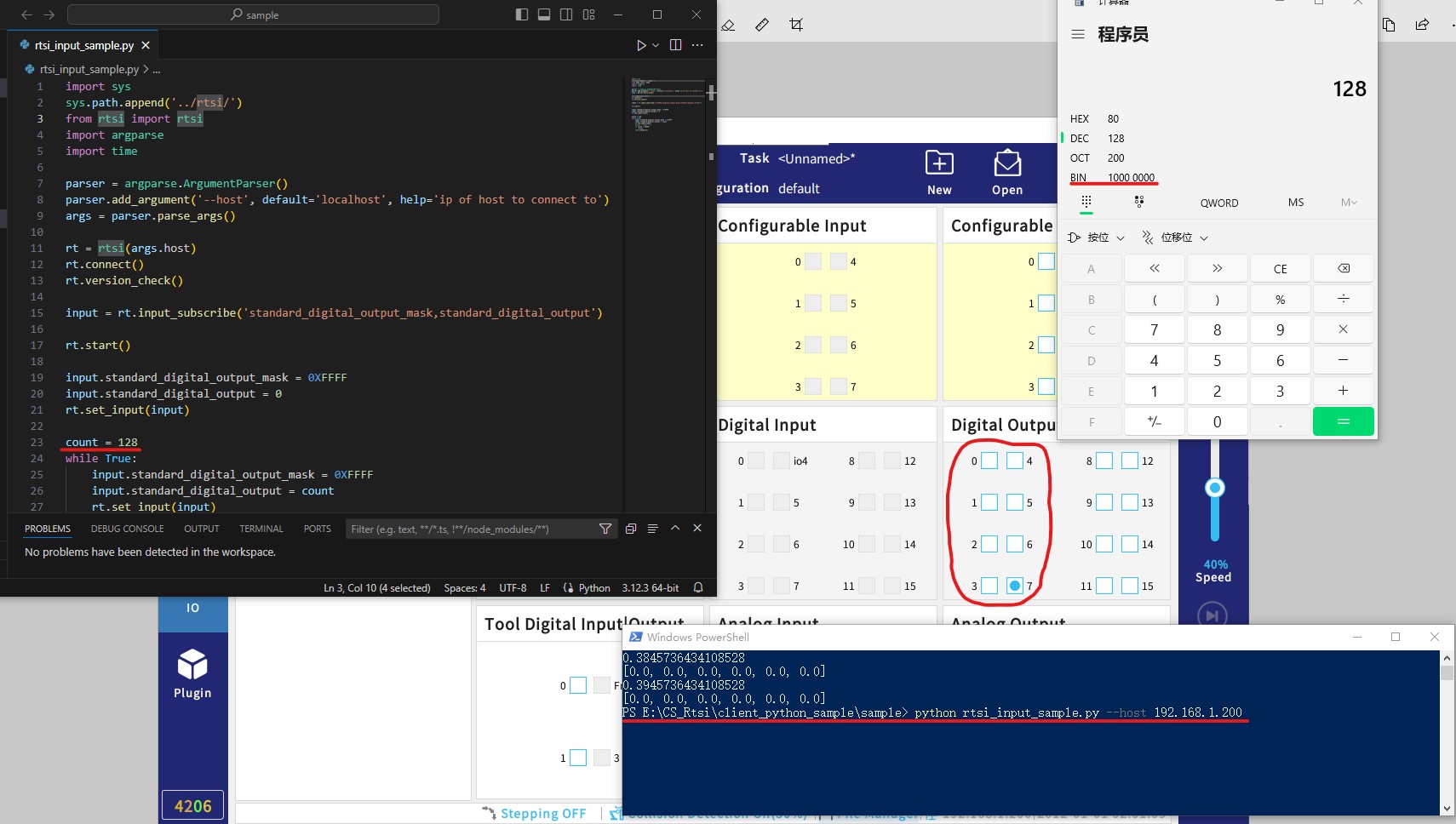
(1) Setting the Digital Output via RTSI
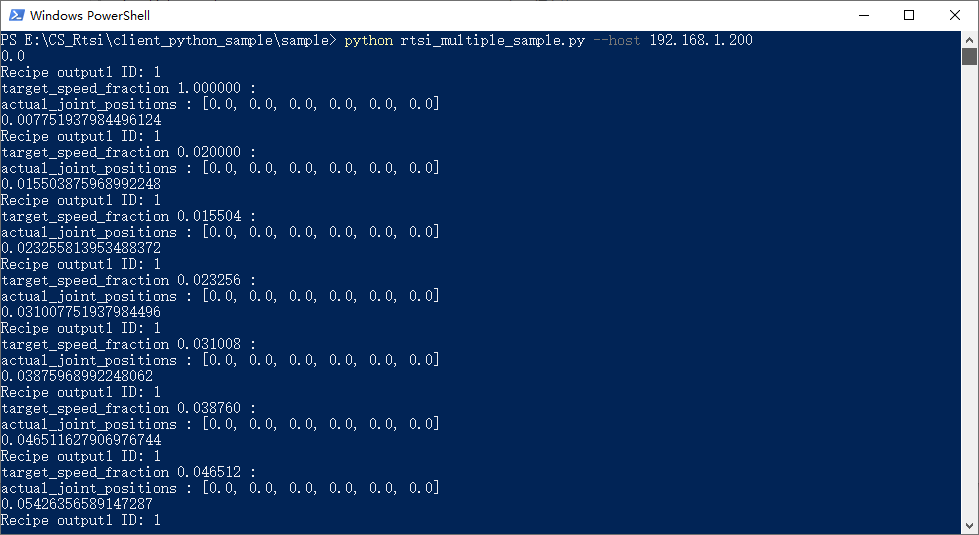
(2) Getting multiple datas of robot like speed,joint position from RTSI
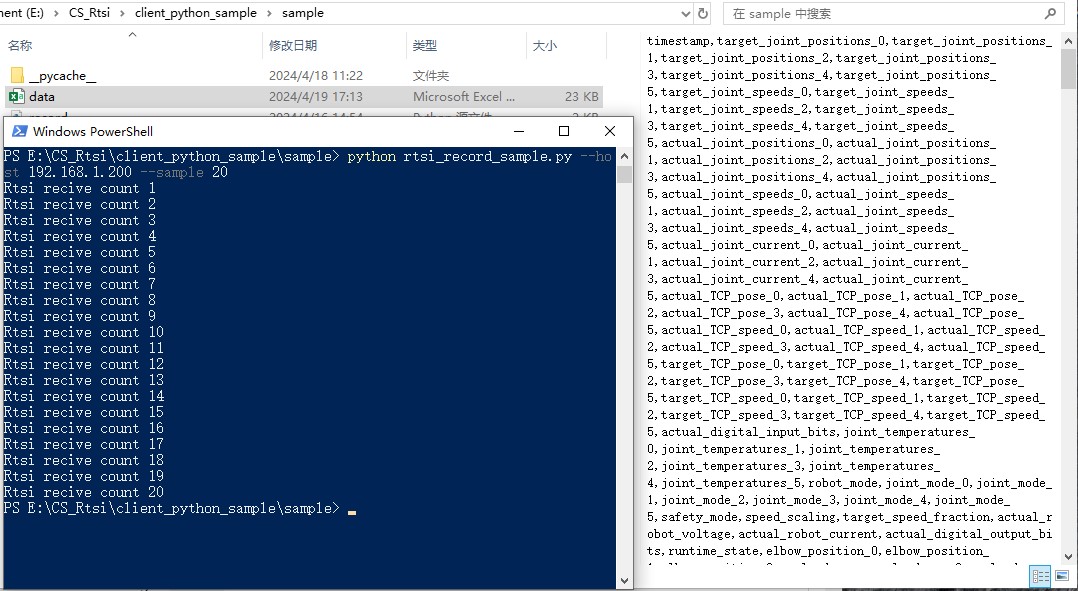
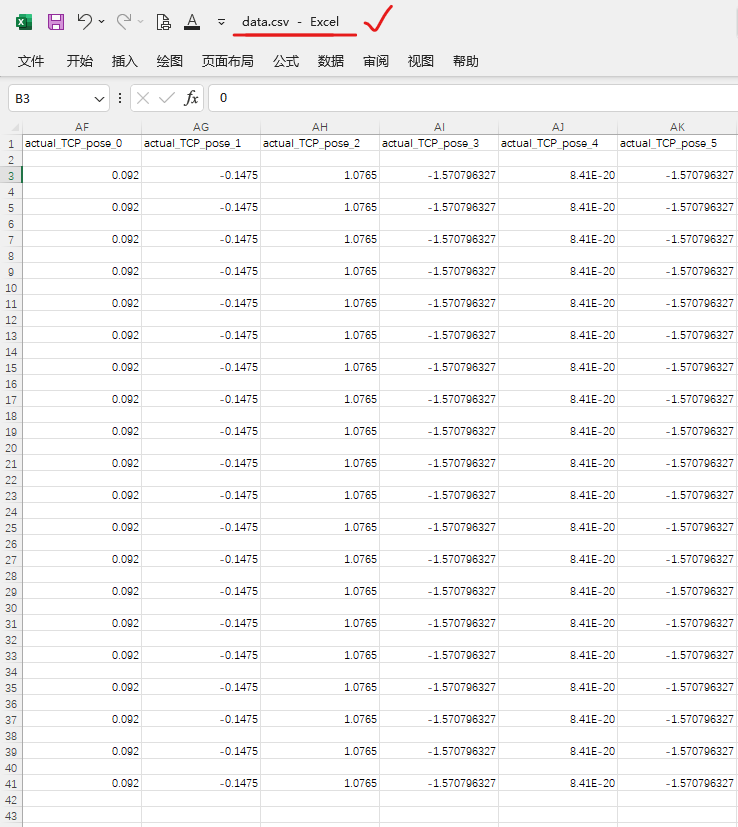
(3) Record all the subscribed data and save into "data" file, which format is CSV.
(4) Simple sample
(Note: for the commands or subscribed data, please check this link:
https://drive.google.com/drive/folders/1pLQNriP0plBfJGyvUhNR3dWOXglgPP18 for detail explanantion )





