在机器人的应用场景中,外部急停必不可少,并且所有的安全io信号都是双通道(冗余)输入(为了避免单一故障不会导致安全功能丧失)。艾利特EC系列机器人配备了紧急停止和防护停止,其中紧急停止和防护停止都可以使机器人停止运动,不同的是紧急停止会使机器人掉电下伺服,但防护停止不会。具体差异见下表。
对于安全IO相关的使用规范,请详细参考用户手册,该文章只介绍如何使用
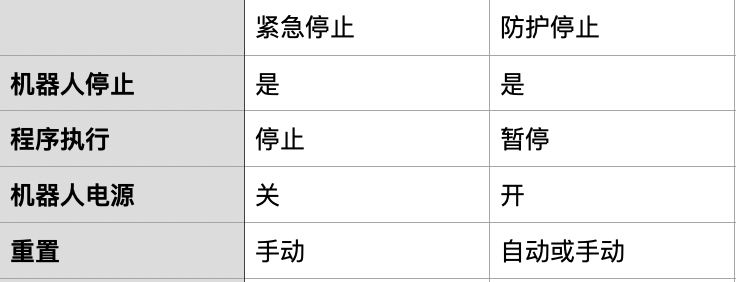
图 1-1中显示控制箱的数字I/O、模拟 I/O和所有安全 I/O,其中J106 端子排是用于外部急停相关的配置,J114端子排用于防护停止相关的配置。

图 1-1 : 控制箱 I/O 接口
图 1-2 中显示控制盒 I/O 接口的示意图。

图 1-2 : 控制箱内部电气接口布局
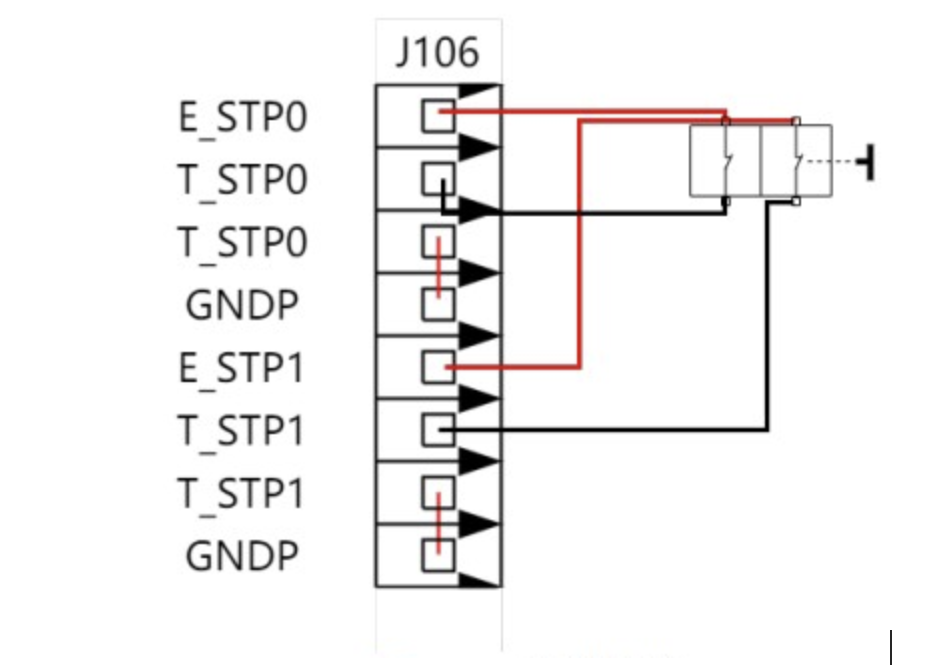
在大多数应用场景中,通常需要一个或多个额外的紧急停止按钮,而艾利特机器人的示教器已经配置了一个急停按钮,如需额外扩展外部急停按钮,可通过如下方式进行配置。
出厂状态下:E_STP0和 T_STP0短接,E_STP1和 T_STP1短接
将原本短接的 E_STP0 与 T_STP0 和 E_STP1 与 T_STP1 使用急停按钮代替,当按钮按下断开时,触发紧急停止。
图 2-1 显示了使用 示教器急停按钮 和 外部急停按钮 都能紧急停止时的连接方法。

将 T_STP0 和 GNDP 和 T_STP1 和 GNDP 短接可以使 示教器急停按钮 失效。
图 2-2 显示了仅使用 外部紧急按钮 紧急停止的连接方法,示教器急停按钮将失效。
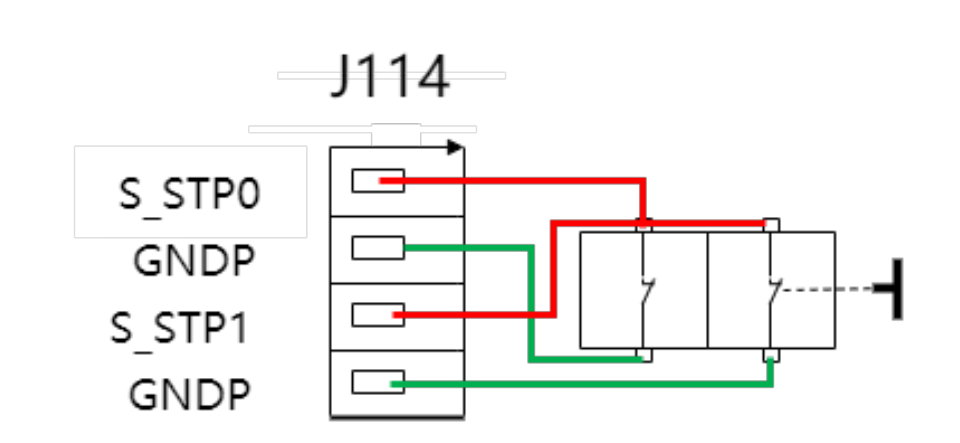
防护停止也称为保护停止,防护停止将暂停程序的运行,但机器人本身不下电。防护停止后,如需机器人继续运行,需要手动按下示教器上的绿色运行按钮即可恢复程序的运行,也可通过用户plc进行关联外部启动S1信号,达到自动恢复程序运行的效果。
出厂状态下:S_STP0与GNDP短接,S_STP1与GNDP短接
将原本短接的 S_STP0与GNDP和 S_STP1与GNDP 使用常闭按钮代替,当按钮按下断开时,触发防护停止。