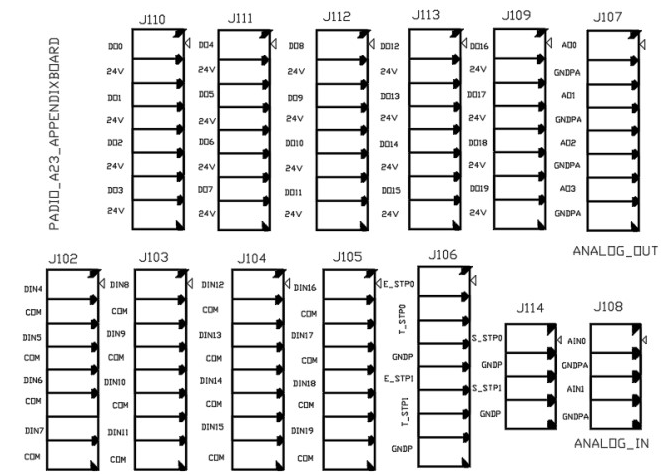
Figure 1-1 showes controller I/O board, including digital I/O, analog I/O and all Safe I/O
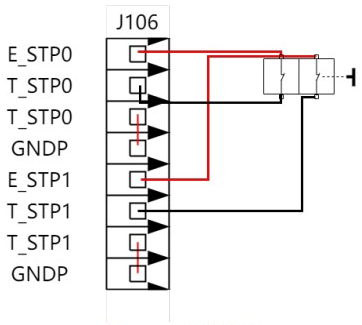
J106 for emergency stop
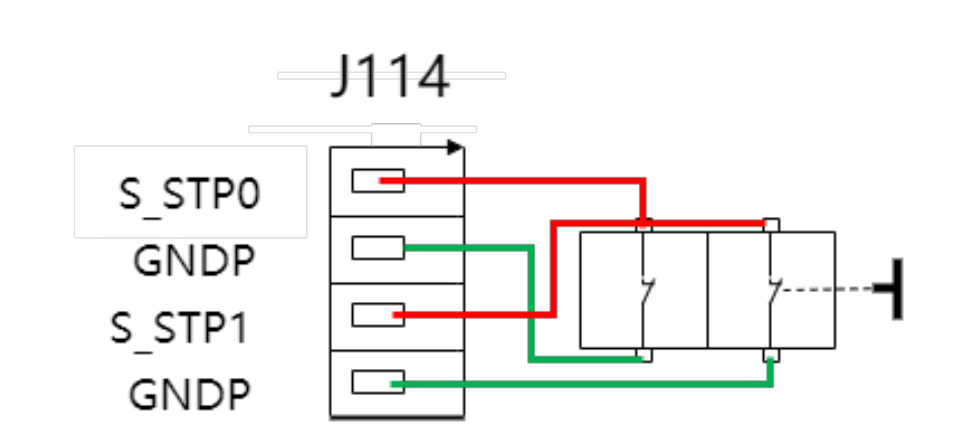
J114 for safeguard stop

E_STP0 connect with T_STP0, E_STP1 connect with T_STP1 in default

connect T_STP0 with GNDP , connect T_STP1 with GNDP will disable teachpendant EStop
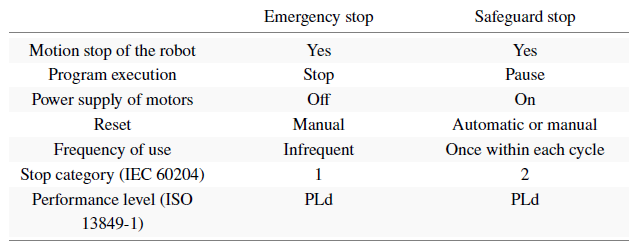
Safeguard stop will pause program. Robot will still be in MotorON state. After safeguard stop, user can press Green Start button on the teachpendant to resume robot program running or use PLC to start robot signal S1 to resume robot running.
S_STP0 connect with GNDP,S_STP1 connect with GNDP in default