所谓干涉区是指防止几个机器人之间、机器人与周边设备之间干涉的功能。本系统干涉区最多可设定 16 个,其使用的方法有立方体干涉区和轴干涉区。
+干扰区域 1~16 的输出信号分别对应虚拟输出 M440~M455。如果 TCP 移动到指定区域,或关节进入特定范围,信号将变为高电平。一旦离开干扰区,信号将返回低电平。如果信号需要输出到外部设备,则应通过修改 PLC 程序(第10章)将相应的虚拟输出映射到实际输出 Y。
本系统中立方体干涉区是与基座坐标系(直角坐标)任一坐标轴平行的立方体。系统对机器 人控制点进行判断,判断是在干涉区内还是干涉区外,并把判断情况以信号方式输出。(ON: 区域内;OFF:区域外)
立方体干涉区的设定方法有以下两种:
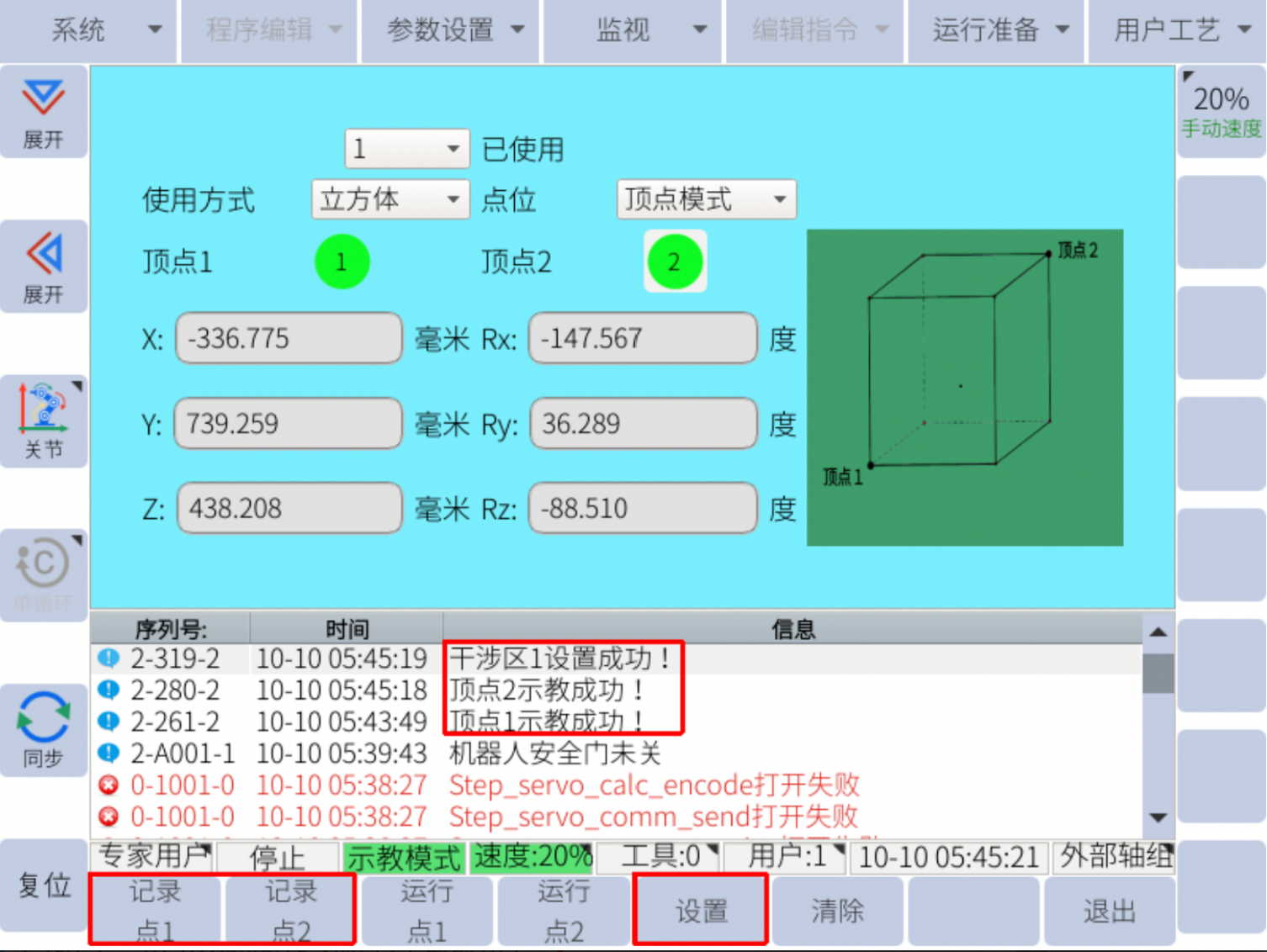
图1. 顶点模式
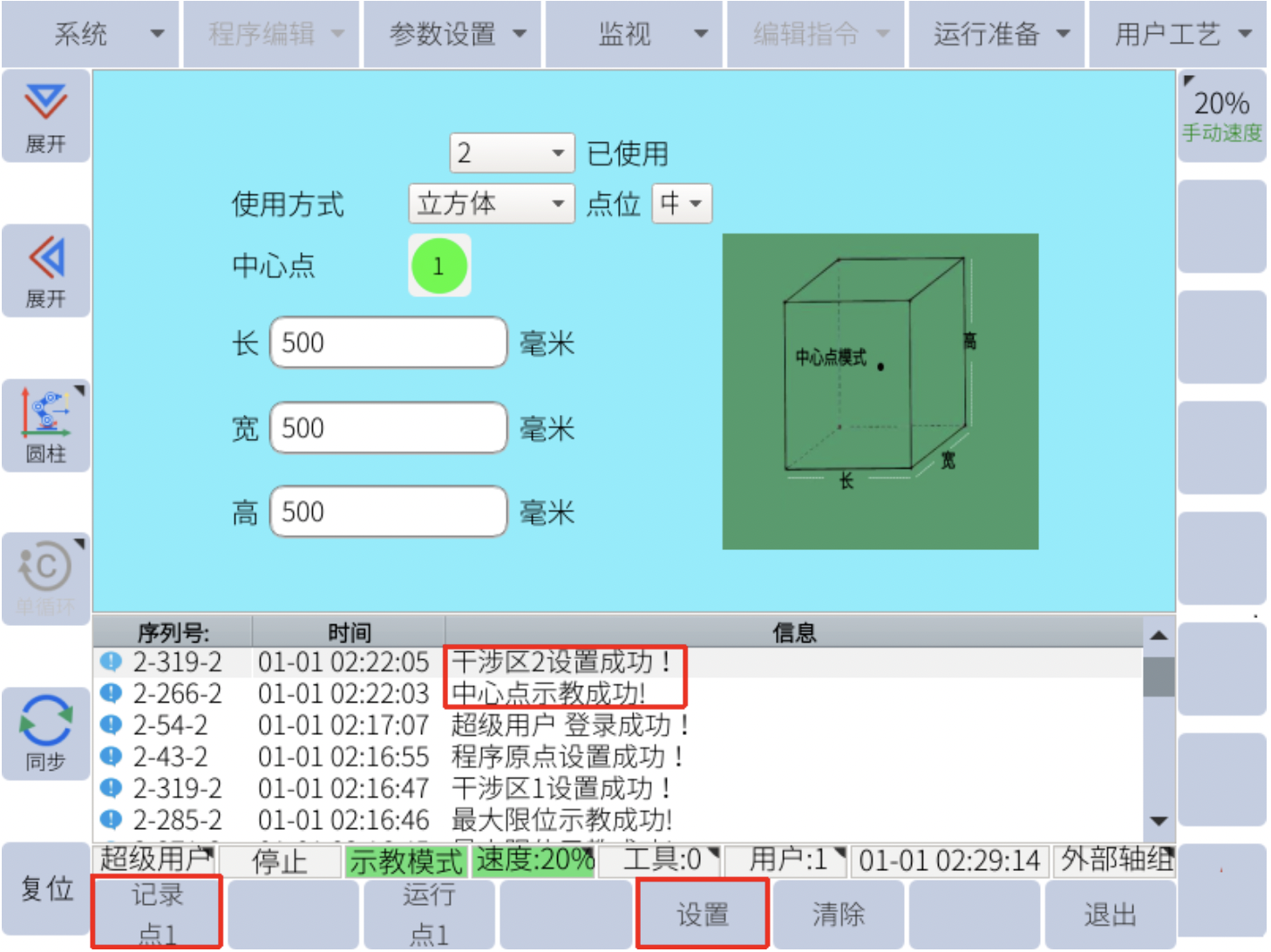
图2. 中心点模式
轴干涉区是指判断各轴当前位置并输出信号的功能。设定各轴正方向、负方向各自动作区域 的最大值和最小值,判断各轴当前值是在区域内侧或外侧,并将该状态作为信号输出。(ON: 区域内;OFF:区域外)
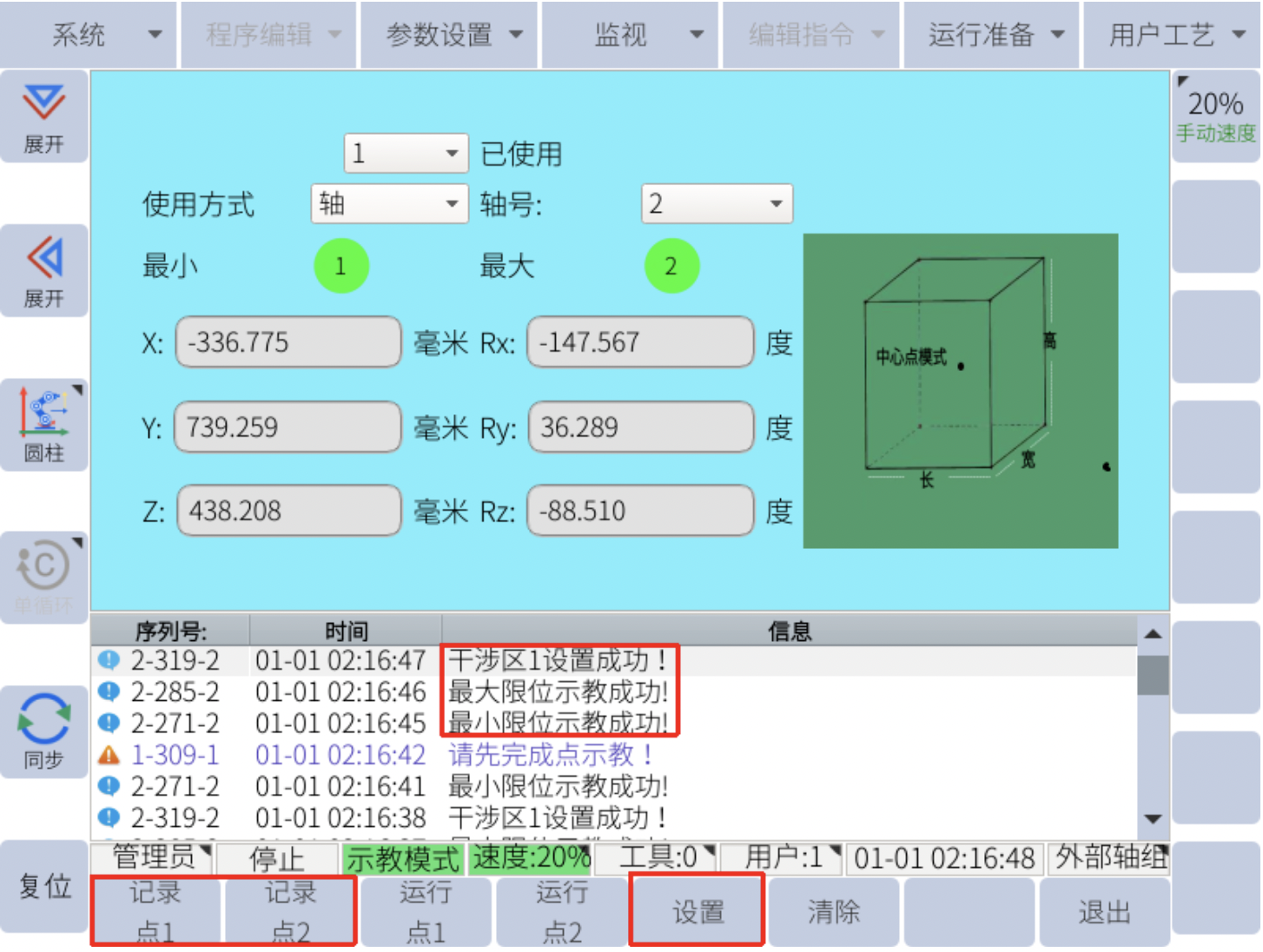
图3. 轴干涉区







