EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】利用相机自动修正机器人TCP
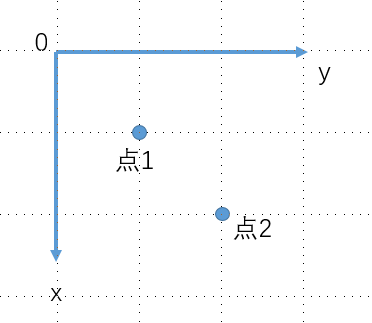
TCP表示机器人当前使用的工具末端在法兰盘坐标系下的xyzabc的偏差。例如MOVEL V=50.0MM/S CR=0.0MM TOOL#(1) USER#(1) V001 表示机器人用当前工具末端的TCP(TOOL1数据),走到USER1坐标系下的点1(V001:x,y,z,a,b,c)的位置,例如下图。此时,若机…
分享
手机扫码分享
复制链接
0
1506
2.
【论坛】elite ec66 如何利用easy handeye进行手眼标定
最近需要利用机械臂做抓取任务需要用到手眼标定,采用easy handeye标定工具,elite机械臂的ros包已安装,并通过了真机测试,采用的相机为realsense D435i,但是不会用easy handeye工具包,网上的教程也看了,都失败了,想请教一下社区大佬这个easy handeye怎么用
分享
手机扫码分享
复制链接
0
1076
3.
【论坛】埃尔森 A系列 相机
分享
手机扫码分享
复制链接
0
585
4.
【论坛】森萨帕特 V20-RO-P3-M-M2-L 相机
分享
手机扫码分享
复制链接
0
605
5.
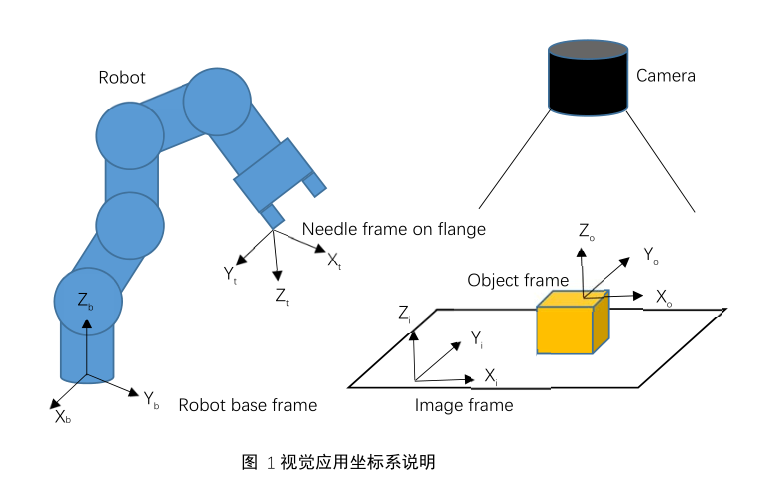
【论坛】机器人视觉应用
机器人视觉应用按照安装方式分为固定式和机持式,实际上无论是固定式和机持式,对于二维视觉应用来说,整个流程和使用实则是一样的,因为机持式只是机器人每次在一个固定的位置拍照,就跟固定式情况下拍照一样。 …
分享
手机扫码分享
复制链接
5
1880
6.
【论坛】lua脚本实现TCP客户端通信及交互示例
Elite机器人支持TCP/UDP的服务器和客户端,本章将介绍TCP客户端的实现。在实际应用场景中,若机器人与相机进行通讯,通常情况下,相机会作为一个服务器,并且已经规定客户段请求的数据内容,机器人按照指定的数据内容向相…
分享
手机扫码分享
复制链接
0
3299
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件