EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
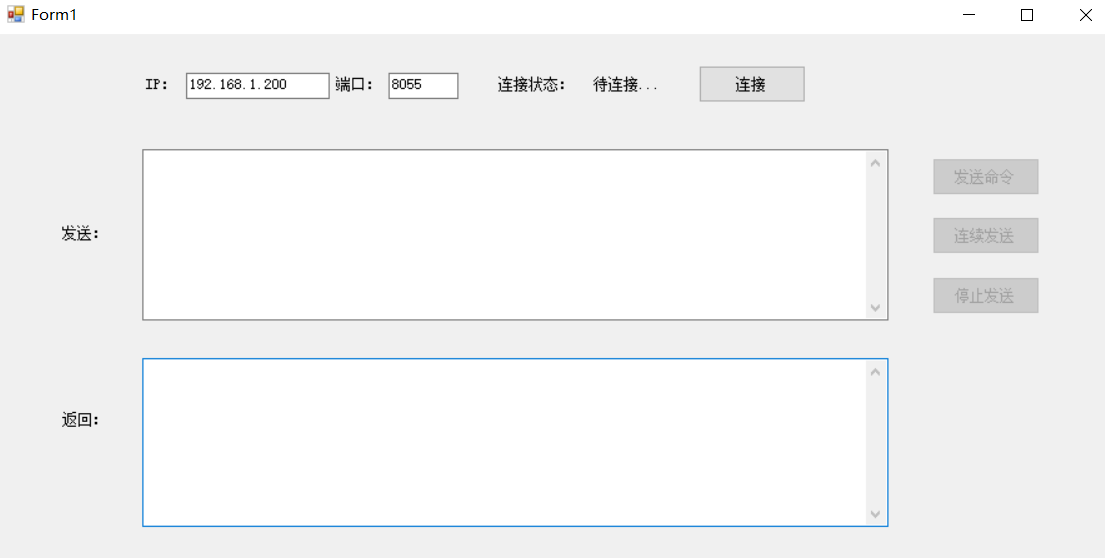
【论坛】C#上位机-针对EC机器人
EC机器人为支持用户进行二次开发而开放了机器人控制器端口,其中8055端口是控制接口,可以控制机器人的启停,运动,获取机器人各种状态,以及运动学的一些算法等。其实现的方式就是TCPIP通讯,机器人做服务器,用户需要…
分享
手机扫码分享
复制链接
0
1701
2.
【论坛】lua脚本实现TCP客户端通信及交互示例
Elite机器人支持TCP/UDP的服务器和客户端,本章将介绍TCP客户端的实现。在实际应用场景中,若机器人与相机进行通讯,通常情况下,相机会作为一个服务器,并且已经规定客户段请求的数据内容,机器人按照指定的数据内容向相…
分享
手机扫码分享
复制链接
0
3289
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件