EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
所有分类
通用发布
机器人功能使用
二次开发
通讯
基础使用
所有标签
modbus
通讯
rtu
TCP
门型框
基础
MOVE
网页示教器
推荐
最新
最热
1.
置顶
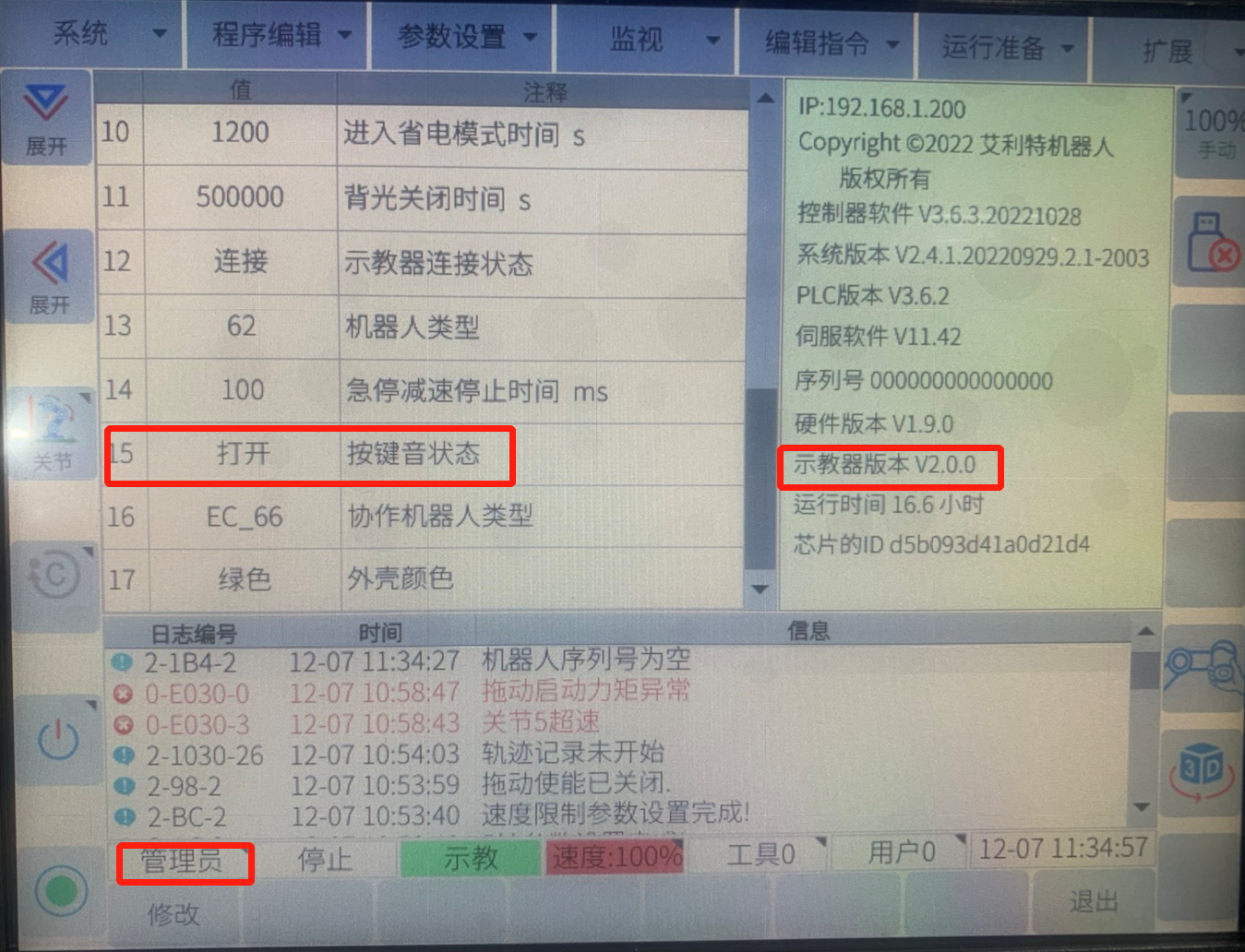
EC怎么关闭示教器声音
1.示教器版本至少 v2.0.02.控制器版本至少 V3.2.23.管理员权限,密码3333334.在参数设置-控制器参数-按键音状态中调整
分享
手机扫码分享
复制链接
0
1641
2.
外部同步信号的作用是什么?
刚开机的状态,如果不给外部同步信号,会有什么现象?原理是什么?与精确/非精确有什么关联吗?哪位大神给解答下,谢谢!
分享
手机扫码分享
复制链接
1
469
3.
lua中位置数组与JBI交互
例如机器人在lua中通过socket接收到一段轨迹点位并保存数组,则lua和jbi可以通过交互,在jbi中使用lua中的点位数组相关lua代码如下:sleep(0.3) Pose_arr = {{400,12.543,25.9139,2.30554,-0.00000,-3.14159}, {400,25.9819,36.2783,2.48465,-0.00000,-3.14159}, {400,…
分享
手机扫码分享
复制链接
0
1038
4.
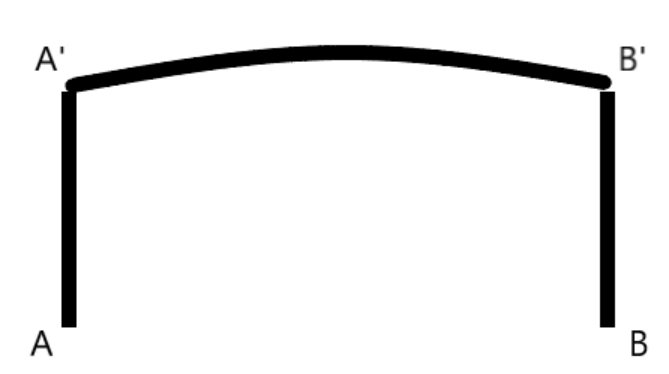
基础搬运入门——门型框轨迹
在机器人应用中,最常见的就是搬运任务。门型框式轨迹是搬运任务的基础,各种形式的运动轨迹都是由门型框轨迹为基础变化而来,而上下料、码垛等复杂搬运任务都是将这些门型框变化而来的运动轨迹串联而成的。 当…
分享
手机扫码分享
复制链接
0
2007
5.
MOVE系列指令:绑定工具坐标、用户坐标的妙用
MOVE系列移动指令是EC机器人在3.4版本后推出的新指令。带有比MOV系列指令更多的参数。虽然使用起来不如MOV系列指令快捷,但是可以完成一些MOV指令无法完成的应用。本文将介绍其中其中比较突出的应用之一:利用部分MOVE系列…
分享
手机扫码分享
复制链接
0
1562
6.
EC系列机器人反向驱动功能使用文档
软件版本本文档基于V3.2.2应用场景反向驱动模式主要是用于上电之后先手动移动机械臂至安全位置,例如开机超出软极限、不能自行松闸做编码器标定,或者是某些关节无法移动的场景。示教器界面使用方法用户可点击 ,再点…
分享
手机扫码分享
复制链接
0
1930
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册协议》条款
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件