
Elite Cobot has three running mode:
Mode | Description |
TEACH | Teach mode: jogging robot, configure parameters, create or modify program files. |
PLAY | Play mode: running program |
REMOTE | Remote mode: Control robot via external command,alarm clear /synchronization/speed adjust functions are disabled in Teach Pendent |
When robot in PLAY Mode, there are three ways to start running the program:
start-up key is internal way, we will focus on the rest two way, which are external way, details will follow up.
Here list system varibles which will be used later on
Variables Name | Description |
X4~X19 | State as DI4~DI19 Value:TRUE/FALSE |
Variables Name | Description |
Y0~Y19 | State as DO0~DO19 Value:TRUE/FALSE |
Variable | Description | Variable | Description |
M0 | robot status in emergency stop 0:emergency stop(E-stop) 1:normal | M1 | external emergency stop status 0:in external E-stop 1:normal |
M400 | servo status 0:servo off 1: servo on | M401 | robot in Progron original position 0:not in original position 1:in original position |
M416 | TEACH mode status 0:not in TEACH mode 1:in TEACH mode | M417 | PLAY mode status 0:not in PLAY 1:in PLAY mode |
M418 | REMOTE mode status 0:not in REMOTE mode 1:in REMOTE mode | M419 | 0:runnign key on TP is not pressed 1:running key on TP is pressed |
M420 | 0:pause key on TP not pressed 1:pause key on TP pressed | M421 | 0:servo key on TP is not pressed 1:servo key on TP is pressed |
M424 | 0:other status 1:robot in stop | M425 | 0:other status 1:robot in pause |
M427 | 0:other status 1:robot in running | M428 | 0:other status 1:robot in Alarm |
M464 | 0:cursor is not on first line in program 1:cursor points to first line in progam | M465 | state of Synchronization 0:not sync 1:Sync |
M466 | collision status 0:no collision 1:in collision |
Variable | Description |
S0 | external E-stop |
S1 | start |
S2 | pause |
S3 | servo on |
S4 | clear Alarm |
S6 | cursor jump to first line of program(only active when robot in stop status) |
S17/S18 | trigger reduced mode |
S19 | recovering from safe-guard stop |
External IO or PLC signals can start the robot program.
Example:three external buttons, to clear system alram & synchronize encoder, then servo on , start program, pause program. JBI program name mainfy.jbi。
1、connect three external buttons to x4~x6,which states of DI4~DI6。(please connect signals based on your case, In this example, DI 4 is used to clear alram & sync system & servo on, DI 5 is used to start main program, DI 6 is used to pause program)
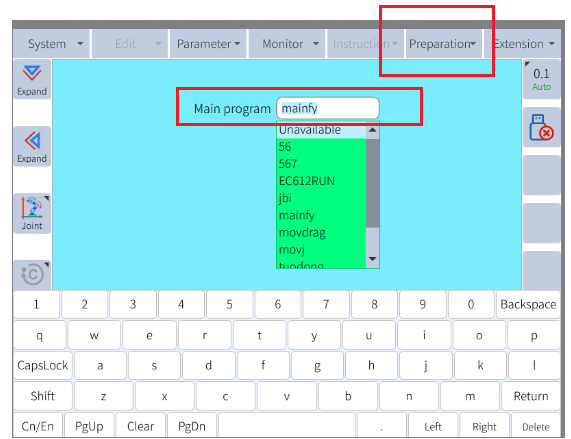
2、Set mainfy.jbi as main program, select Prepartion--main program,as below:
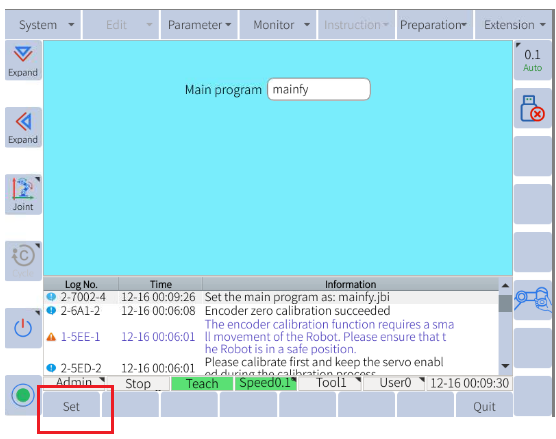
3、select mainfy and click set. "set the main prorgam as mainfy.jbi" will be printe on TP as below:
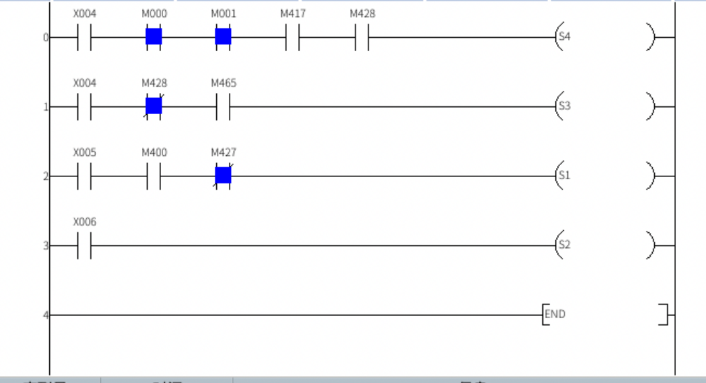
4、Extension->User PLC, edit signals as below:

Explanation as below:
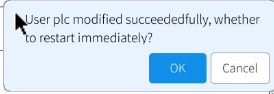
5、click save when done.
6、warning to restart system,click ok, robot will be reboot automaticlly.
7、after reboot system, please switch to play mode by switch key.
8、Program cursor will be jump to first line of the main program.
9、robot will be in alarm when start up, press DI 4 button, alram will be cleared and system will be synchroniz, SERVO status on TP will be light.
10、pressed DI 5, program start to run.
11、pressed DI 6, program will be paused, cancel DI6 , and press DI 5 can continue the program running.
Elite cobot support communications as following:
please refer to user manual for more details.
As communication will not use real botton, so there will be no IO connections, please use virtual signal M to trigger S signal in user PLC.for example, using M600 to replace X004、M601 to replace X005、M602 to replace X006。






