v3.2.3
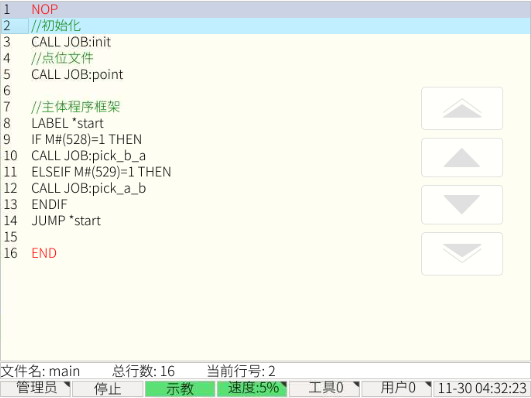
设置主程序目的:可以通过S6寄存器,运行指针跳转到设置的主程序首行。一般用于一开始启动,和需要重新启动的程序逻辑时。
主程序内容,主要是基于客户项目需求,处理一些逻辑流程。
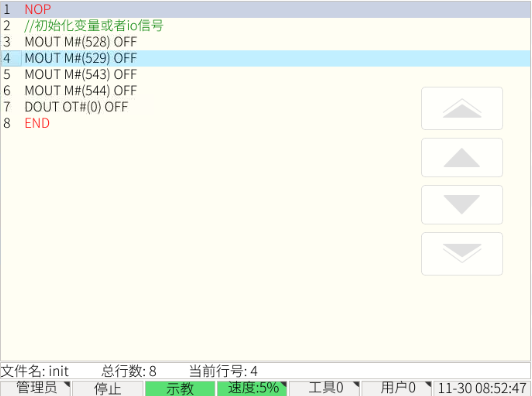
init.jbi程序内容:主要做一些变量和IO信号的初始化
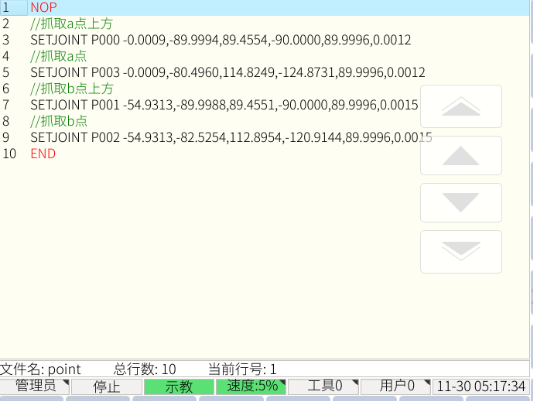
point程序内容:主要存储一些固定点位,以便其他程序复用。
注意:当需要更改点位时,在程序里需要后,需要生效,需要运行一下point.jbi(将点位信息更新到控制器端)
pick_a_b.jbi程序内容:主要处理一些机器人运行的内容。
注意:如果是有和上位机进行通讯,当在主程序中收到运行此程序的信号,程序指针跳入子程序时,需要告知上位机已成功进入(M544)(互锁)。

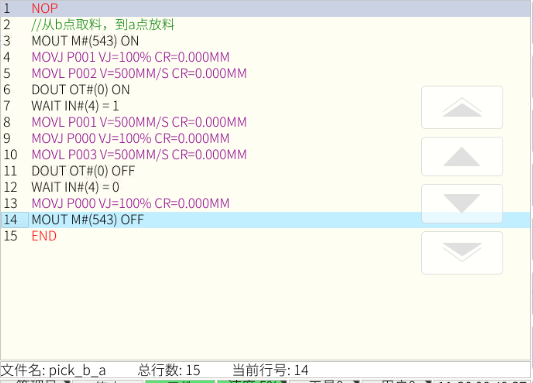
pick_b_a.jbi程序内容:主要处理一些机器人运行的内容。
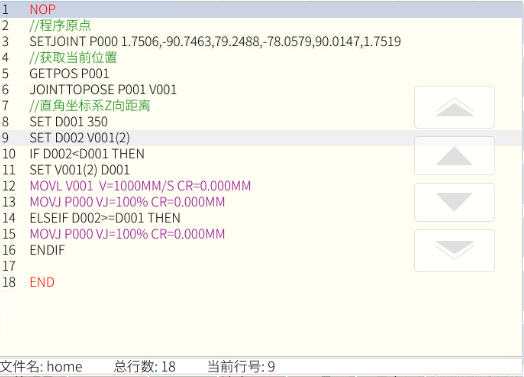
需求:客户可以从机器人任意一个停止的地方回到程序原点。
注意:回零程序需要保证从任意点回程序原点都不可发生碰撞。
示例:获取机器人当前位置,如果在机器人base坐标系下Z向距离小于设定值(D1),就先抬高,再回到home点位
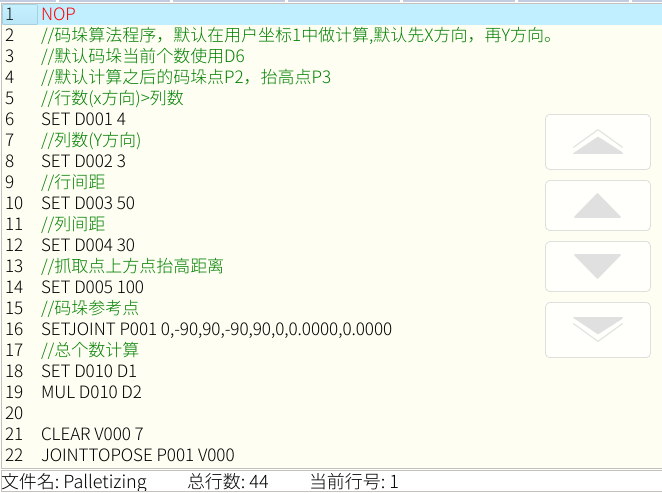
需求:客户可以调整几个参数,就能做到整体码垛的效果
示例 :4X3码垛,行间距50mm,列间距30mm。
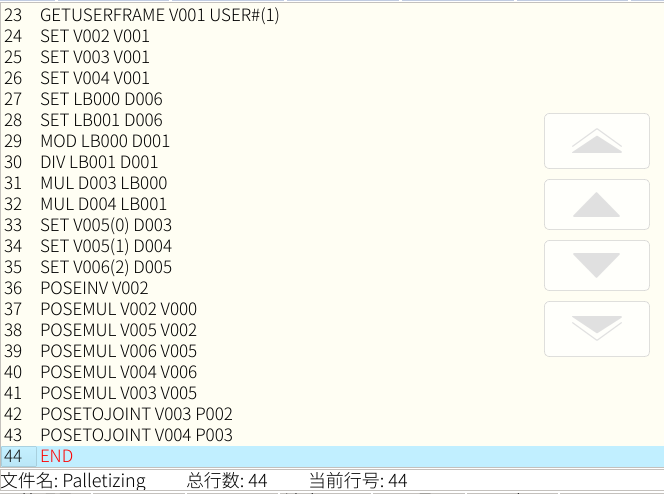
码垛算法程序:palletizing.jbi
码垛运行程序 :main.jbi

注:运行前,先将相关P,V变量打开。







