EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】使用VSCode编写EC系列机器人对应程序
介绍Vscode作为一款轻量化、跨平台的免费的源代码编辑器,一经发布深受许多用户的喜爱。艾利特机器人同时也开发了相应的插件来辅助编写机器人的运动程序和脚本。软件下载安装点击官网下载安装插件的下载插件清单中文汉…
分享
手机扫码分享
复制链接
0
2542
2.
【论坛】EC612通过Ethernet/IP和基恩士通讯问题
EC612机械手通过Ethernet/IP和基恩士通讯,Adapter Slot 0,Adapter Slot 1,Adapter Slot 2,Adapter Slot 3,组中的寄存器对应的EC612地址怎么设置?LUA脚本 ret get_eip_int_input_registers(addr,size) 获取的寄存器值存放的地址是多少,怎么能对应起来?
分享
手机扫码分享
复制链接
0
1195
3.
【论坛】CS脚本计算用户坐标系及对准功能
用户可以使用以下代码,计算坐标系,p1为原点,p1p2为x方向,p1p2p3构成xy平面# author: chenliao@elibot.cnimport math def dot_product(v1, v2): return sum(a*b for a, b in zip(v1, v2)) def cross_product(v1, v2): return [v1[1]*v2[2] - v1[2]*v2[1], …
分享
手机扫码分享
复制链接
0
1399
4.
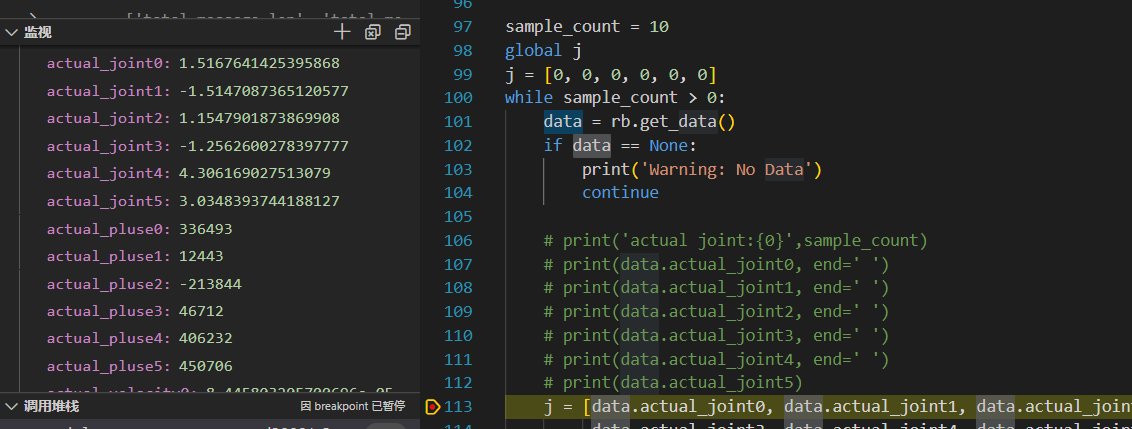
【论坛】示教器python脚本解析30001返回数据
根据相关手册,可以获取机器人30001返回的所有数据解析。可以使用以下代码,直接复制到示教器运行,即可解析30001返回数据。数据的名称,也可以先将代码置于vscode运行,并设置断点,查看变量名字。在下方使用时,例如直…
分享
手机扫码分享
复制链接
0
1743
5.
【论坛】CS机器人上位机修改全局变量方法总结
在机器人配置界面新建全局变量,例如A9获取全局变量的值:不论机器人程序处于停止或运行(包括通过示教器启动程序或者运行外部通过30001发来的脚本):上位机均可通过29999端口的以下指令获取该全局变量variable -get A9修改…
分享
手机扫码分享
复制链接
0
1536
6.
【论坛】CS机器人Interpreter Mode解释器模式
CS系列支持Python脚本运行,并且脚本分为sec脚本与def脚本,脚本功能介绍如下。def脚本为主程序脚本,一次仅支持一个def脚本运行,如果在第一个def脚本运行过程中,下发第二个def脚本,则会强制停止第一个运行中的def脚本,去…
分享
手机扫码分享
复制链接
0
1083
7.
【论坛】利用29999,30001和全局变量获取机器人反馈数据
例如,希望获得机器人当前位姿,或者其他数据,在不解析30001/30004返回数据的前提下,可以使用全局变量来实现。1. 在机器人配置中创建全局变量,例如c_pose2. 向30001端口发送以下脚本,也可发送关键字sec开头,end结尾(不打…
分享
手机扫码分享
复制链接
0
2153
8.
【论坛】CS脚本中使用29999端口dashboard
CS机器人29999端口dashboard对外只能使用FB1口。如果想在机器人脚本中使用29999dashboard功能,可以使用如下代码# author: chenliao@elibot.cn # Aug.10, 2023 global b b = socket_open("6.0.0.10",29999,"socket_1") # 真实机器人,脚本中使用29999端口,填写如…
分享
手机扫码分享
复制链接
0
1612
9.
【论坛】通过总线组信号选择机器人程序
用户希望通过总线(pn,eip等)上的组信号(例如32bit的int等),发送机器人程序号。机器人根据接收到的组信号调用不同程序,同时将接收到的信号发送回PLC,例如下图中的prgNoIn为PLC发送的信号,prgNoOut为机器人返回给PLC的确认信号要在程序任务树中直接使用此类信号(可以在下拉菜单选择),需要现在IO界面对具体信号重命名,如下图。被重命名过的信号,可以在键盘的输入/输出中出线并被选择机器人在实际执行时,会根据设置的信号名和对应的信号地址,自动转化为对应脚本。以上功能需要将机器人程序升级
分享
手机扫码分享
复制链接
0
1337
10.
【论坛】上位机获取CS机器人变量/位置数据信息
CS机器人目前通过30001端口(机器人以100ms的频率发送定长数据)向上位机返回固定格式内容数据。用户收到数据后需要自行解析用户也可以通过pc向30001端口发送脚本,控制机器人运行。例如上位机想获取当前机器人位置,可以通…
分享
手机扫码分享
复制链接
0
1523
11.
【论坛】CS寄存器查看器插件
CS机器人中,提供了包括128个输入bool寄存器,128个输出bool寄存器,48个输入int(32位带符号)寄存器,48个输出int寄存器38个输入float(32位浮点数)寄存器,48个输出float寄存器。这些寄存器数据可以通过诸如脚本指令write_output_boo…
分享
手机扫码分享
复制链接
0
1060
12.
【论坛】CS示教4点码垛实现
CS机器人自带码垛包,采用如上示教4个角点,设置每行/列个数自动完成码垛。对于以上的代码简化实现,可以直接下载以下链接的代码,并根据实际工艺在脚本中修改。链接:https://pan.baidu.com/s/1lmBxH6k3nqSe-b1o1cDkWw提取码:9e8i1.…
分享
手机扫码分享
复制链接
1
1782
13.
【论坛】使用VSCode快速编写CS机器人脚本
CS机器人脚本手册可以参考 https://www.elibot.cn/download/technique?category=2&series=2&keyword=&page_index=1在vscode中,也可以下载URScript插件,使用该插件快速编写CS机器人脚本,可以使用提示助手,也有语法高亮
分享
手机扫码分享
复制链接
0
2641
14.
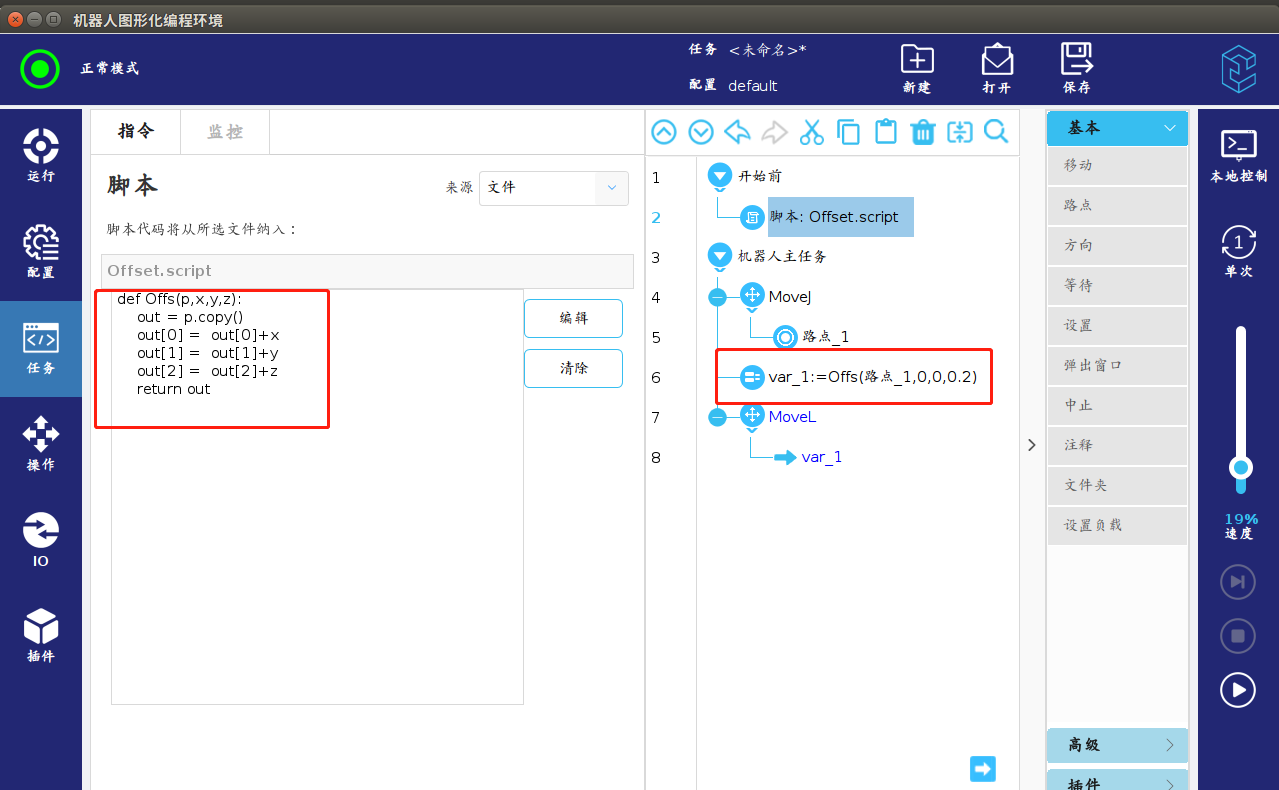
【论坛】CS中基于用户坐标系偏移的脚本
CS未直接提供基于用户坐标系的偏移可以使用以下代码,配合上图的图形化编程,实现基于 坐标系1的x方向0.2m的偏移。 在图形化界面中,记录的例如上图的路点_1均为基于base坐标系def Offs(p,x,y,z,user=[0,0,0,0,0,0]): # 传入的p是基…
分享
手机扫码分享
复制链接
0
1468
15.
【论坛】脚本中编写偏移函数
若希望实现基于某个参考点的x,y,z方向偏移,可以编写如下函数Offset注:python中,若a=[0,1,2,3] b=a, 则修改b的值,a的值也会被修改。建议使用如下的copy函数def Offs(p,x,y,z): out = p.copy() out[0] = out[0]+x out[1] = out[1]+y out[2] = out[2]+z return out
分享
手机扫码分享
复制链接
0
1359
16.
【论坛】CS机器人末端与DH手抓modbus_rtu通讯
CS机器人末端与DH手抓modbus_rtu通讯1假设当前使用的DH抓手通讯速率如下,则在CS机器人的的工具IO设置界面,按照如下设置2可以使用如下代码,控制夹爪打开/关闭或者自定义行程。使用时,可以直接示教器界面插入脚本,代码行…
分享
手机扫码分享
复制链接
0
1703
17.
【论坛】LUA读取德森特力传感器脚本
根据德森特 力传感器手册,机器人通过485通讯,参照以下指令,可以获取传感器返回的当前FX,FY,FZ和MX,MY,MZ读浮点数格式的测量值:发送:01 03 04 00 00 0c 44 77返回:01 03 18 46 23 A3 14 C6 23 B7 14 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 5B 70…
分享
手机扫码分享
复制链接
0
1213
18.
【论坛】C#上位机-针对CS机器人
CS机器人提供了丰富的外部接口,包括用户可以通过29999端口对机器人进行启动,停止等操作,以及通过30001端口向机器人直接发送脚本。同时30001端口以10hz频率,向用户返回预先定义好的数据(包括关节位置,位姿等,返回数据…
分享
手机扫码分享
复制链接
0
2300
19.
【论坛】ec66如何通过串口控制机器人运行jbi程序
电脑通过RS485发送给机械臂串口指令,然后机械臂运行jbi程序。目前的思路是在机械臂中运行一个lua脚本监听来自串口的指令,接收到命令则去运行jbi程序。不知道这种思路是否正确?以及关于lua如何调用jbi,lua如何开机自动运行的方面不是很明确。
分享
手机扫码分享
复制链接
1
956
20.
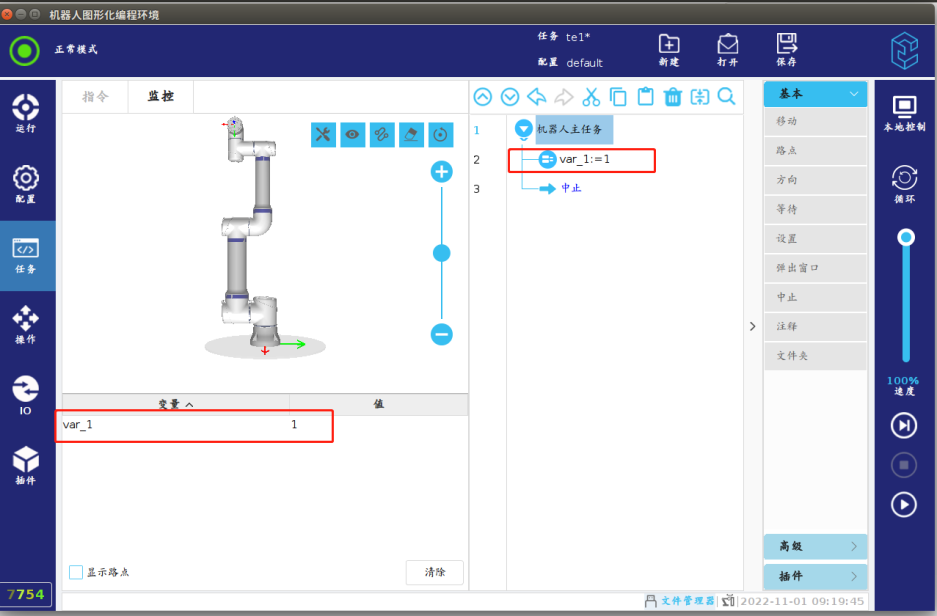
【论坛】CS示教器实时显示脚本中的变量数据
在CS机器人UI界面,可以创建变量,例如下图的var_1。运行时可以在 监控 画面 看到该变量的当前值。实质是机器人创建了global 变量var_1如果希望在示教器监控界面显示脚本中的变量数据,需要在脚本中创建global变量,并且后续对该变量赋值。此时运行程序,可以在示教器的监控界面看到该变量的当前值
分享
手机扫码分享
复制链接
0
1290
21.
【论坛】如何设置CS机器人控制柜IP地址
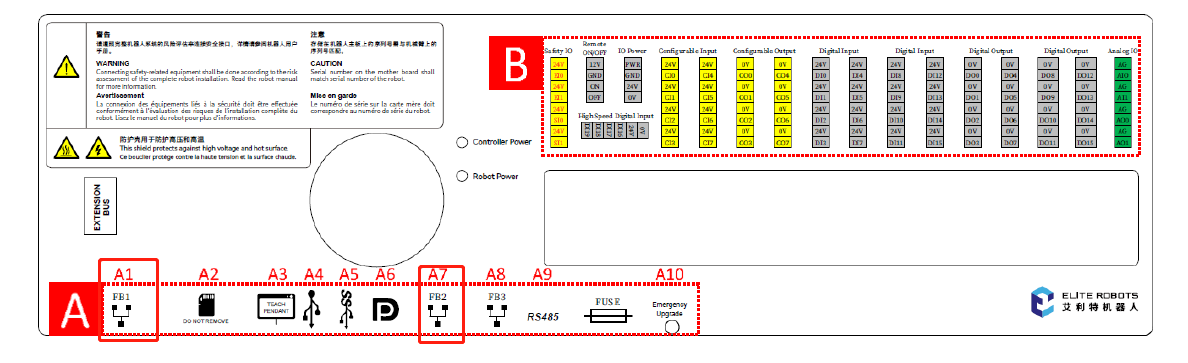
CS机器人控制柜有3个网口,分别为FB1,FB2,和FB3。 FB3留待后期增加功能,目前不使用。PC可以连接FB1口,PC通过VNC远程操控示教器界面,或者通过FTP上传/下载机器人文件机器人运行脚本中的socket指令时,通过FB2口与外界通讯。机器人与PLC进行PROFINET通讯时,也连接FB2口。若机器人作为modbus master读写其他slave设备时,也通过FB2口进行。可以进入示教器,点击右上角 艾利特机器人图标,点击 设置,进入网口设置,对FB1和FB2网口进行IP地址设置
分享
手机扫码分享
复制链接
0
1741
22.
【论坛】机器人作为socket客户端与外部设备通讯
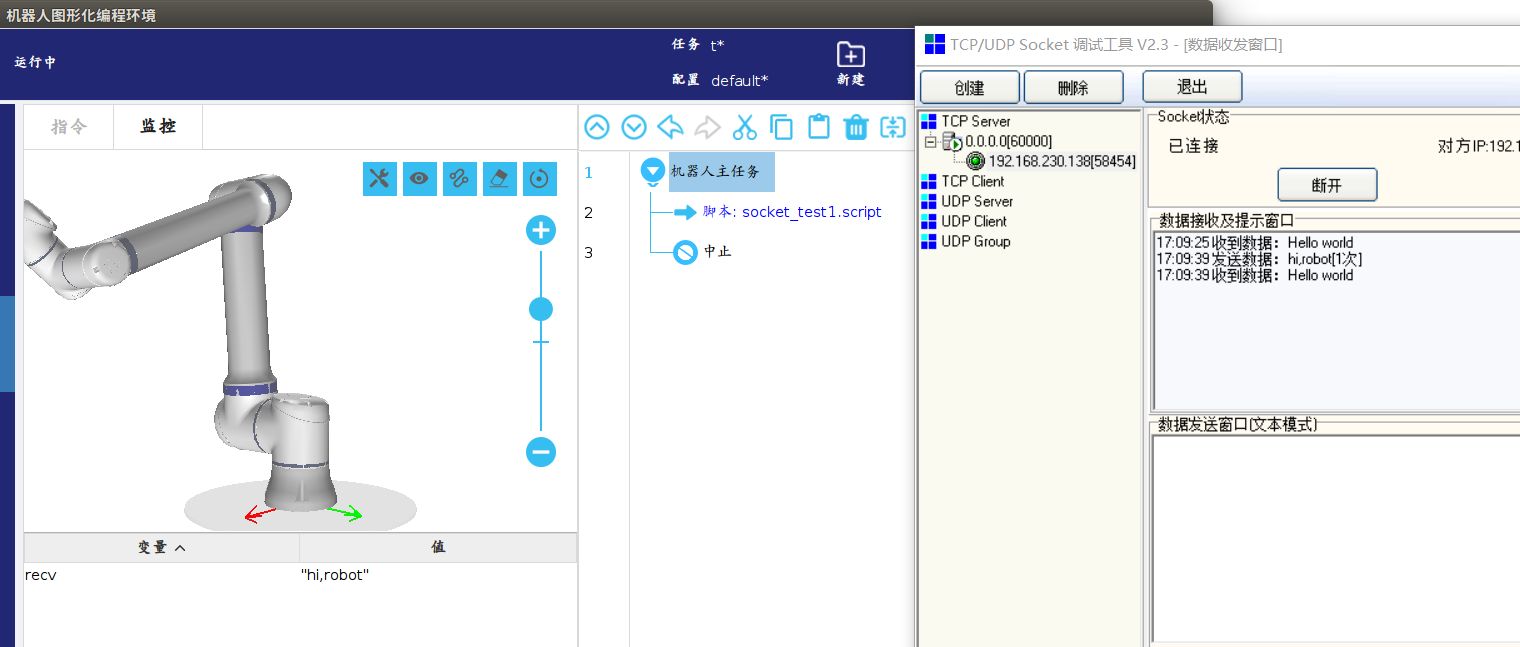
机器人可以作为socket客户端,与外部设备通讯。相关指令可以参见CS机器人脚本手册(https://www.elibot.cn/#/download 下载 CS_脚本手册_V2.0.3)例如,可以在机器人中创建如下脚本socket_open("192.168.230.1",60000,"socket_1") # 打开socket,此处IP地…
分享
手机扫码分享
复制链接
0
2838
23.
【论坛】机器人远程模式外部发送脚本控制机器人
机器人使用30001端口,与外部进行10Hz的交互。即机器人通过30001端口,每100ms返回固定的机器人状态(位置,tcp等)外部设备可以往30001直接发送机器人脚本,机器人处于远程模式,机器人就会运动。(点击下图右上角的Elite logo…
分享
手机扫码分享
复制链接
0
4047
24.
【论坛】示教4点实现码垛(无需创建user坐标系)
应用需求仅需示教一层垛型的四个角点(无需创建user坐标系),按照示教的方向进行码垛和拆垛(不必先x后y方向)导入test_pallet.jbi及test_pallet_setting.jbi程序,导入pallet_calculation.lua,并加载到lua的第一个脚本以下为码垛设置部分…
分享
手机扫码分享
复制链接
0
2313
25.
【论坛】EC系列机器人jbi程序示范写法文档
软件版本v3.2.3设置主程序设置主程序目的:可以通过S6寄存器,运行指针跳转到设置的主程序首行。一般用于一开始启动,和需要重新启动的程序逻辑时。主程序内容主程序内容,主要是基于客户项目需求,处理一些逻辑流程。…
分享
手机扫码分享
复制链接
0
2123
26.
【论坛】EC机器人Lua脚本和jbi程序交互示例
背景随着机器人技术的不断进步,机器人的工作已经不仅仅是简单的执行运行指令,往往会伴随着大量的计算和通讯任务。其中通讯用来和外部设备交互,做数据传输或一些逻辑控制,而计算则常用来做一些数学运算,进制转换…
分享
手机扫码分享
复制链接
1
3333
27.
【论坛】U盘导入JBI程序和LUA脚本
1.1 JBI导入方法准备一个U盘,在U盘根目录下新建rbctrl文件夹,并在该文件下新建luadir文件夹,将配套的脚本(.lua格式)放到luadir文件夹下,将对应的程序(.jbi格式)放到rbctrl文件夹下,并将U盘插至控制柜U盘口。点击系统->文件…
分享
手机扫码分享
复制链接
0
3922
28.
【论坛】lua脚本实现TCP客户端通信及交互示例
Elite机器人支持TCP/UDP的服务器和客户端,本章将介绍TCP客户端的实现。在实际应用场景中,若机器人与相机进行通讯,通常情况下,相机会作为一个服务器,并且已经规定客户段请求的数据内容,机器人按照指定的数据内容向相…
分享
手机扫码分享
复制链接
0
3301
29.
【论坛】使用VSCode编写EC系列机器人对应程序
介绍Vscode作为一款轻量化、跨平台的免费的源代码编辑器,一经发布深受许多用户的喜爱。艾利特机器人同时也开发了相应的插件来辅助编写机器人的运动程序和脚本。软件下载安装点击官网下载安装插件的下载插件清单中文汉…
分享
手机扫码分享
复制链接
0
8217
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件