EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】JBI和LUA中实现基于透传的直线插补(可任意设置速度)
希望示教2个点(起点和终点姿态不一样),可以设定运行速度,通过透传TT实现末端直线的插补(包括姿态的SLERP平滑插补),可以使用以下jbi和lua代码JBI代码如下:NOP SETJOINT P000 11.6717,-82.5665,70.2302,-74.1454,73.4545,12.1825 // P000 开始…
分享
手机扫码分享
复制链接
0
1036
2.
【论坛】如何使用JBI,使机器人末端绕着固定坐标系旋转
绕着固定点旋转(基于TCP方向或者base或者用户坐标系方向),需注意,V变量需跟随工具坐标变化而变化,如果想得到比较好的旋转效果,需正确的设置TCP位置,并更新当前TCP的记录点(V10).附代码:NOP // 基于当前TCP记录开始…
分享
手机扫码分享
复制链接
0
868
3.
【论坛】微段Movml/时间戳运动 和透传的区别
微段Movml/时间戳运动:均受机器人运行速度百分比的影响 JBI中的微段Movml,需事先离线生成点位,点位之间的时间间隔相同。在点位.jbi中只需设置时间间隔,例如10ms SDK中的时间戳功能,需事先离线生成点位,每个点位有对应…
分享
手机扫码分享
复制链接
0
3440
4.
【论坛】JBI中微段轨迹MOVML的使用
可以通过离线仿真软件或者LUA等计算方式,获得等时间间隔的轨迹点(例如每10ms,最小可至1ms)。这些轨迹点位可以是Joint或者笛卡尔空间的。机器人基于以上离线轨迹,可以方便实现匀速运动(例如等时间等距离的轨迹)机器…
分享
手机扫码分享
复制链接
0
1468
5.
【论坛】透传(外部实时控制)在JBI与LUA中的使用
透传(transparent transformation)是艾利特机器人EC系列中高阶的运动指令接口,允许用户自己设计并运行一段固定或者实时变化的路径。这项功能使用户可以完全控制运动路径的插补方式与运动速度,也可以在搭载了传感器和控制…
分享
手机扫码分享
复制链接
0
2322
6.
【论坛】保存所有工具数据和用户坐标系数据到JBI文件
机器人的工具和用户坐标系数据实时保存到机器人控制器。为避免误修改,可以使用以下lua代码,将所有tool和user数据保存到jbi。用户在使用时,可以在初始化时加载该jbi并初始化tool和user数据-- Author: chenliao@elibot.cn -- May.5, 2023 fu…
分享
手机扫码分享
复制链接
0
1000
7.
【论坛】lua中位置数组与JBI交互
例如机器人在lua中通过socket接收到一段轨迹点位并保存数组,则lua和jbi可以通过交互,在jbi中使用lua中的点位数组相关lua代码如下:sleep(0.3) Pose_arr = {{400,12.543,25.9139,2.30554,-0.00000,-3.14159}, {400,25.9819,36.2783,2.48465,-0.00000,-3.14159}, {400,…
分享
手机扫码分享
复制链接
0
1245
8.
【论坛】LUA生成JBI轨迹程序文件
例如LUA 接收到机器人的一段轨迹点位,那么可以通过lua讲点位转成JBI程序轨迹。前台JBI只需要等待lua转化完,并调用新的轨迹即可。JBI程序,NOP SET B001 0 TIMER T=1 S SET B001 1 // 请求lua开始转化并生成 轨迹jbi程序 // 等待lua转化完成 …
分享
手机扫码分享
复制链接
0
1246
9.
【论坛】EC机器人合集
1. 常见使用问题 1. B站视频链接:https://bbs.elibot.cn/forum/detail/topic/130.html 2. 机器人打包程序:https://bbs.elibot.cn/forum/detail/topic/143.html 3. 关闭示教器提示声音:https://bbs.elibot.cn/forum/detail/topic/254.html 4. 通过U盘导入JBI和l…
分享
手机扫码分享
复制链接
0
13156
10.
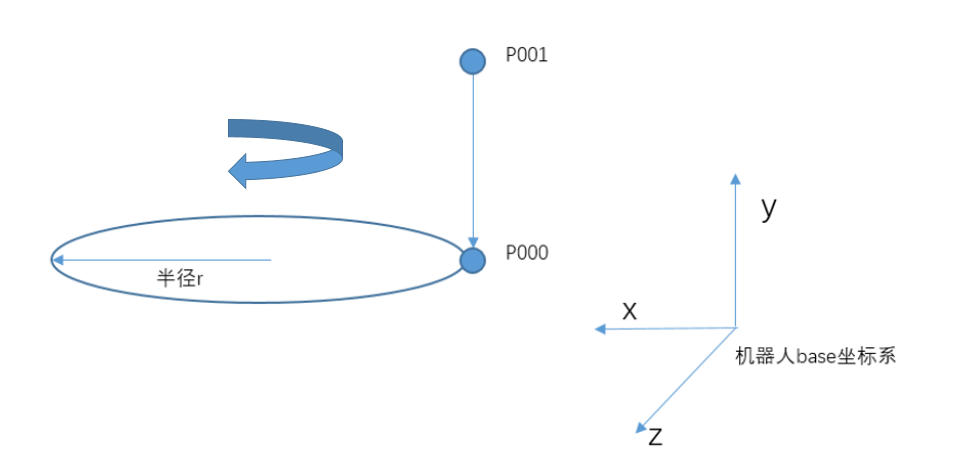
【论坛】机器人以相对固定姿态画圆
如上图,希望机器人示教圆心位置(工具tcp的z与坐标系的z对正),设定圆的半径以及相对坐标系z的夹角,实现上图画圆效果(过程中机器人tcp某个方向一直沿着圆轨迹的切线方向行进)。可以使用以下JBI及lua代码机器人JBI代码…
分享
手机扫码分享
复制链接
0
2450
11.
【论坛】ec66如何通过串口控制机器人运行jbi程序
电脑通过RS485发送给机械臂串口指令,然后机械臂运行jbi程序。目前的思路是在机械臂中运行一个lua脚本监听来自串口的指令,接收到命令则去运行jbi程序。不知道这种思路是否正确?以及关于lua如何调用jbi,lua如何开机自动运行的方面不是很明确。
分享
手机扫码分享
复制链接
1
956
12.
【论坛】通过JBI/LUA 打开关闭机器人碰撞检测
EC机器人只支持 通过sdk 打开/关闭机器人碰撞检测功能。 sdk相关语句见sdk 手册的2.2.2.32 设置安全参数。该指令支持机器人在remote和自动模式下设置!!该指令可以在机器人 自动模式下修改机器人 碰撞检测功能,即用户可以在l…
分享
手机扫码分享
复制链接
0
1328
13.
【论坛】EC机器人MOVJ和MOVEJ区别
请问各位大佬们,EC系列机器人的JBI指令中有MOVEJ和MOVJ两条看似差不多的指令,这两条指令的区别在哪里????感谢各位大佬!!!
分享
手机扫码分享
复制链接
1
1130
14.
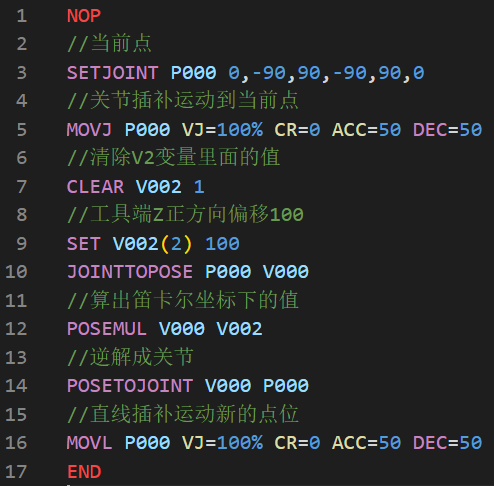
【论坛】ec机器人怎么通过jbi指令,实现基于工具端的偏移运动?
例如:abb指令:MoveL RelTool (p0, 0, 0, 100), v100, fine, tool1;沿工具的z方向,将机械臂移动至距p0达100 mm的一处位置。回答:
分享
手机扫码分享
复制链接
1
1403
15.
【论坛】【ECJP002】USBメモリでファイル(JBIとLUA)を導入する手順
JBIインポート方法USB メモリを準備し、USB メモリのルート ディレクトリに新しい rbctrl フォルダーを作成し、プログラムファイル (.jbi 形式) を rbctrl フォルダに置き、USB メモリをコントローラに挿入します。以下の通りク…
分享
手机扫码分享
复制链接
0
690
16.
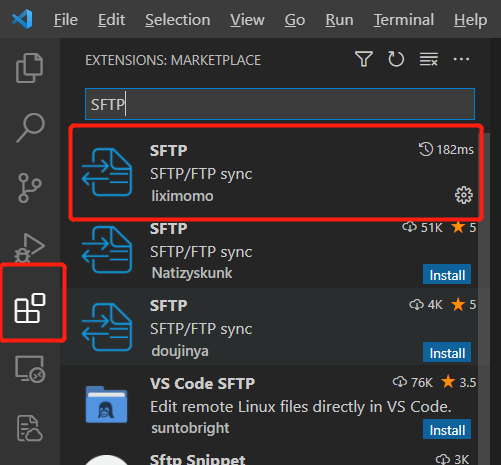
【论坛】SFTP経由でロボットプログラムを転送
ユーザーはSFTPを使用してロボットプログラム(.jbiファイル、.luaファイル)や他の設定ファイルをロボットコントローラに転送することができます。また、ロボットコントローラからファイルをダウンロードすることができ…
分享
手机扫码分享
复制链接
0
1073
17.
【论坛】【ECJP014】連続 32 ビット レジスタ(M 変数)の値を読み取りまたは書き込み、DINT データとの間で変換する方法
連続 32 ビット レジスタ(M 変数)の値を読み取って DINT に変換するか、DINT データを連続 32 ビットレジスタ(M 変数) に保存できます。次の JBI と lua コードを使用します:-- author:chenliao@elibot.cn -- 20220708 NOP SET I000 528 // M変数の…
分享
手机扫码分享
复制链接
0
862
18.
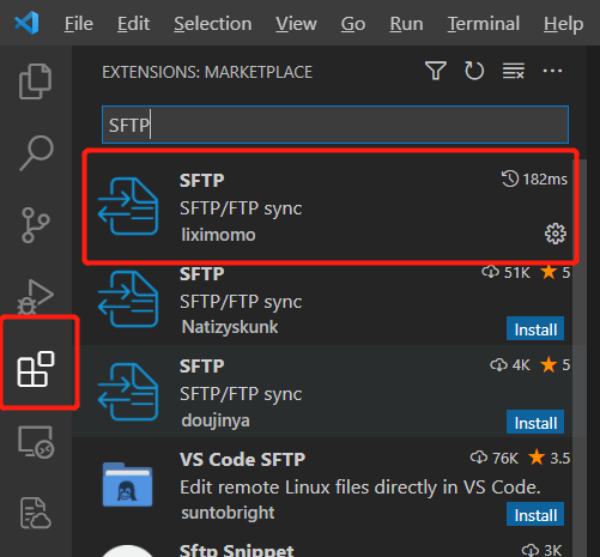
【论坛】【ECEN026】Building JBI and Lua Script for EC Series Robot with VSCode
IntroductionVSCode is a lightweight and cross-platform free source code editor. Most users give it high credit since the release. The developing team of Elite provide the plug-ins to allow users to use VSCode to write JBI programs and Lua Script.Software
分享
手机扫码分享
复制链接
0
1831
19.
【论坛】浮点数转连续32位M变量
对连续32位 M变量,可以读取连续32bit M变量并转成实数(浮点数)存入D变量,或者将D变量数据(实数/浮点数)存储到连续32bit M变量使用如下JBI和lua代码-- author:chenliao@elibot.cn -- 20220729 NOP SET I000 528 //设置开始M变量地址 SET D002 -19…
分享
手机扫码分享
复制链接
0
1207
20.
【论坛】读写连续32bit M变量转DINT
对连续32位 M变量,可以读取连续32bit M变量并转成对用DINT,或者将DINT数据存储到连续32bit M变量使用如下JBI和lua代码-- author:chenliao@elibot.cn -- 20220708 NOP SET I000 528 //设置开始M变量地址 SET D002 -1987 //设置需要赋值的数据 DINT SET B000 2 …
分享
手机扫码分享
复制链接
0
1589
21.
【论坛】机器人TCP快速对准功能及实现
假设机器人当前TCP和base关系如下左图,希望能让当前tcp的Z方向快速垂直于base的xy平面,则可以运行如下align_tcp.jbi(将程序中的第一行设为SET B000 0)程序实现(无需加载对应lua程序)NOP SET B000 0 // B000为0, 当前TCP的Z就近垂直对…
分享
手机扫码分享
复制链接
0
1369
22.
【论坛】示教4点实现码垛(无需创建user坐标系)
应用需求仅需示教一层垛型的四个角点(无需创建user坐标系),按照示教的方向进行码垛和拆垛(不必先x后y方向)导入test_pallet.jbi及test_pallet_setting.jbi程序,导入pallet_calculation.lua,并加载到lua的第一个脚本以下为码垛设置部分…
分享
手机扫码分享
复制链接
0
2315
23.
【论坛】EC系列机器人jbi程序示范写法文档
软件版本v3.2.3设置主程序设置主程序目的:可以通过S6寄存器,运行指针跳转到设置的主程序首行。一般用于一开始启动,和需要重新启动的程序逻辑时。主程序内容主程序内容,主要是基于客户项目需求,处理一些逻辑流程。…
分享
手机扫码分享
复制链接
0
2124
24.
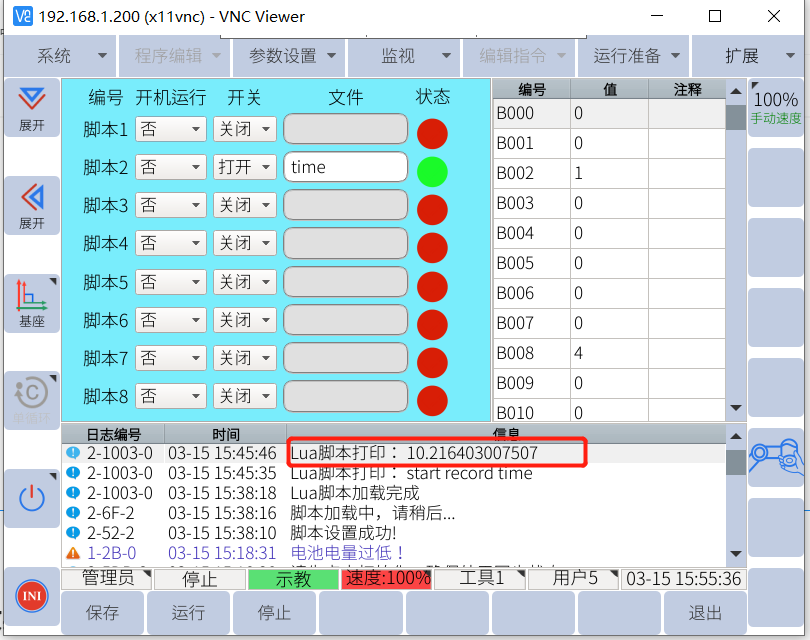
【论坛】EC机器人实现毫秒级计时功能
EC机器人在JBI和LUA侧均未提供计时功能函数(JBI中的TIMER实现的是延时功能,程序需要等待)可以通过调用lua的相关函数,实现计时功能。注:LUA的os.time() 只能返回精度为s的时间粒度,若要实现毫秒级的及时,可以用采用如下代…
分享
手机扫码分享
复制链接
0
1912
25.
【论坛】如何阻止JBI程序预读
MOVL P016 V=800MM/S PL=7 ACC=10 DEC=10MOVL P017 V=800MM/S PL=7 ACC=10 DEC=10MOVL P018 V=800MM/S PL=7 ACC=50 DEC=10DOUT OT#(1) ONMOVL P019 V=800MM/S PL=7 ACC=50 DEC=10以上程序,会在机器人走到p018位置后在打开OT(1)信号吗?还是可能在机器人走到p016时候已经执行OT(1) ON?JBI程序预读一般为几行?阻止预读的话,是把PL设为0,或
分享
手机扫码分享
复制链接
1
1380
26.
【论坛】【ECEN013】How to import JBI program and LUA script from U disk
Preparations:Create a new folder named "rbctrl" in the root directory of the U disk, for program files(.jbi) storage.Create a subfolder named "luadir" under the "rbctrl", and this "luadir" folder for scripts (.lua format) storage.Insert the U disk into th
分享
手机扫码分享
复制链接
0
1123
27.
【论坛】【ECEN009】Data Communication Between JBI and LUA
JBI and LUA in ElibotJBI:Elite collaborative robots use a specific script language called JBI (short for Job Instruction), developedindependently by Elite. Unlike Lua, JBI is the only language with robot motion control instructions,including variables, lo
分享
手机扫码分享
复制链接
0
1099
28.
【论坛】EC机器人Lua脚本和jbi程序交互示例
背景随着机器人技术的不断进步,机器人的工作已经不仅仅是简单的执行运行指令,往往会伴随着大量的计算和通讯任务。其中通讯用来和外部设备交互,做数据传输或一些逻辑控制,而计算则常用来做一些数学运算,进制转换…
分享
手机扫码分享
复制链接
1
3338
29.
【论坛】U盘导入JBI程序和LUA脚本
1.1 JBI导入方法准备一个U盘,在U盘根目录下新建rbctrl文件夹,并在该文件下新建luadir文件夹,将配套的脚本(.lua格式)放到luadir文件夹下,将对应的程序(.jbi格式)放到rbctrl文件夹下,并将U盘插至控制柜U盘口。点击系统->文件…
分享
手机扫码分享
复制链接
0
3928
30.
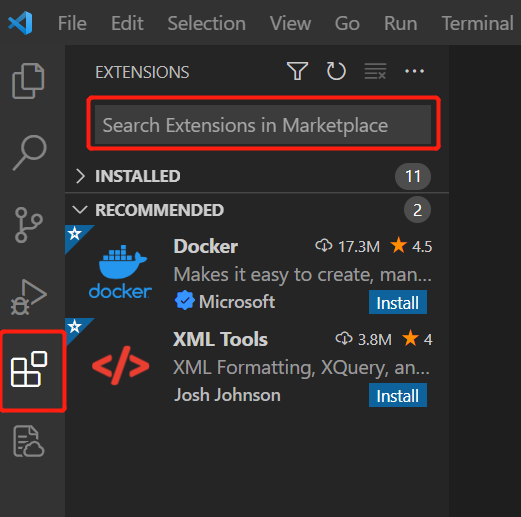
【论坛】【ECEN008】Transfer Robot Program Through SFTP
User can use SFTP to transfer/download robot program( *.jbi, *.lua) and other configuation files to/from robot controller.Robot controller SFTP infoIP:192.168.1.200(Use robot real IP address)Port:22UserName:rootPassword:elite2014VsCodeUse SFTP extensionPC
分享
手机扫码分享
复制链接
0
1835
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件