EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】【CSJP005】CSのバージョンアップ(システム、応用など)
まずはバージョンアップするファイルをダウンロードしてください:https://drive.google.com/drive/folders/1THnRX7cyT40unsJPKCtnJ0OczrAPKYzp1.基本的なソフトウェア ファイル形式はeupで、名前は一般的にCS_UPDATE_vⅹ.x.ⅹ[ooox-ooxo].eupようになっ…
分享
手机扫码分享
复制链接
0
665
2.
【论坛】通过FTP对CS机器人上传下载文件
机器人SFTP端口的基本信息:IP:192.168.1.200(实际使用过程中为机器人的实际ip地址)端口号:22用户名:root密码:elibot以下几种方法均需保证机器人和电脑在同一局域网,并且网络良好(可以ping通)VsCodeSftp文件传输插件-SFTP使…
分享
手机扫码分享
复制链接
0
1919
3.
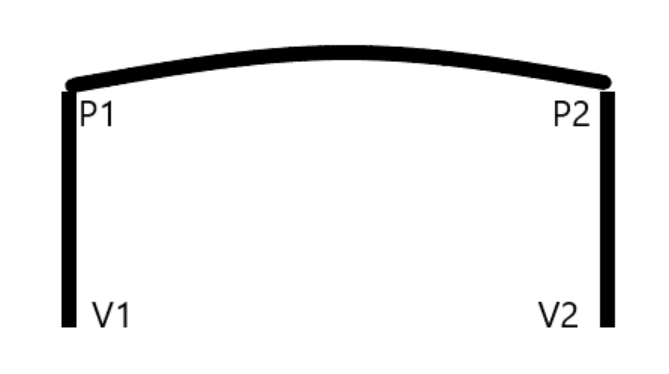
【论坛】基本パレタイジングプログラム作成:門形枠式軌跡の変化
「基本搬送プログラム作成:門形枠式軌跡」では,門形枠式軌跡から簡単な搬送プログラムを作成する方法を紹介した。この記事では、門形枠式軌跡の概念を中心として、単純なパレタイジングプログラムに変更す…
分享
手机扫码分享
复制链接
0
933
4.
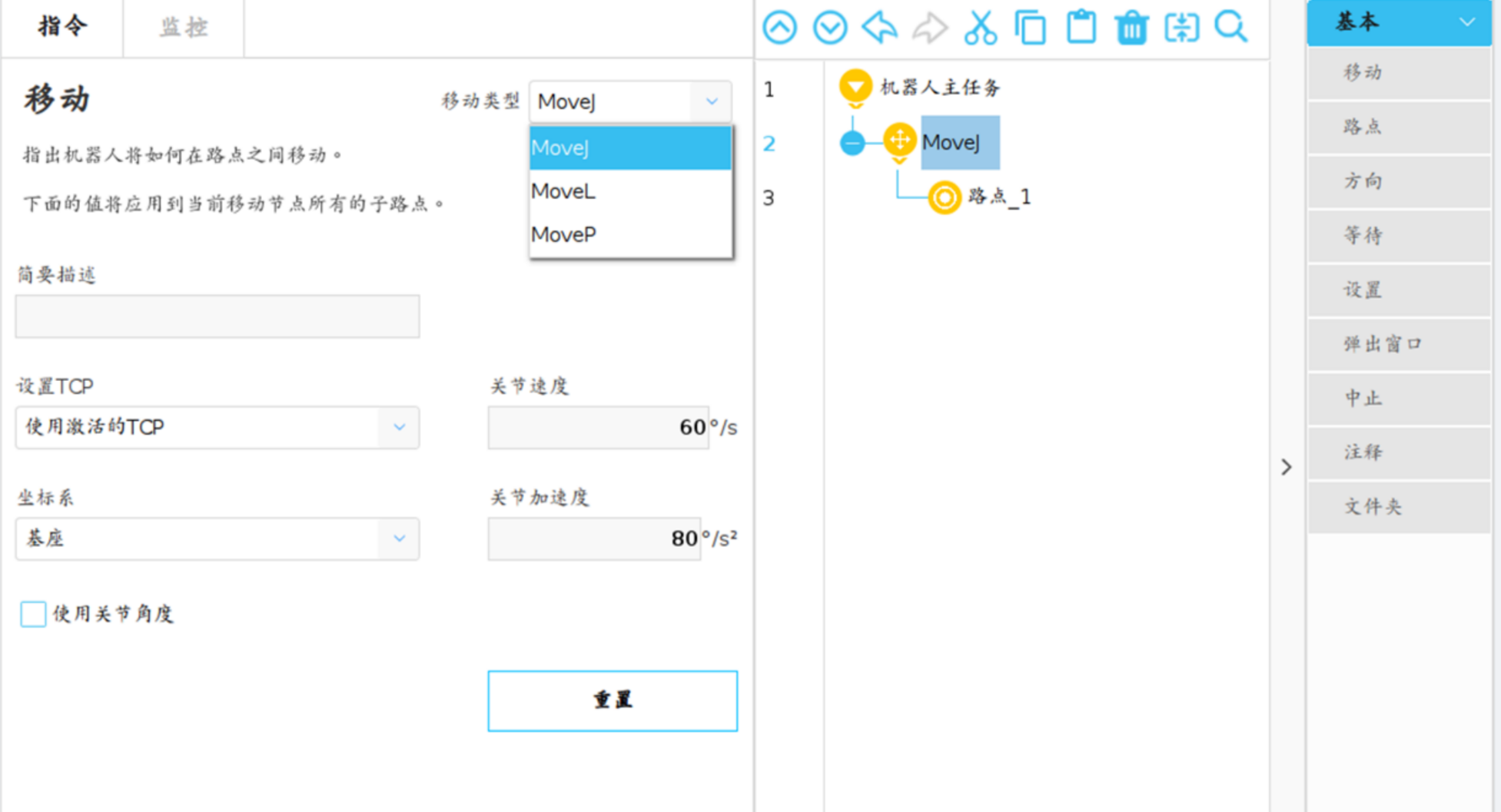
【论坛】CS机器人常用移动指令:关节、直线、工艺、圆弧
MoveJMoveLMovePMoveC路径:在任务-基本-移动中可选择不同的移动方式。具体参数可在左侧“指令”栏设置。【MoveJ】关节运动【MoveL】直线运动【MoveP】工艺运动:可以使TCP以恒定速度进行移动。默认情况下,所有路点使用相同的转…
分享
手机扫码分享
复制链接
0
1915
5.
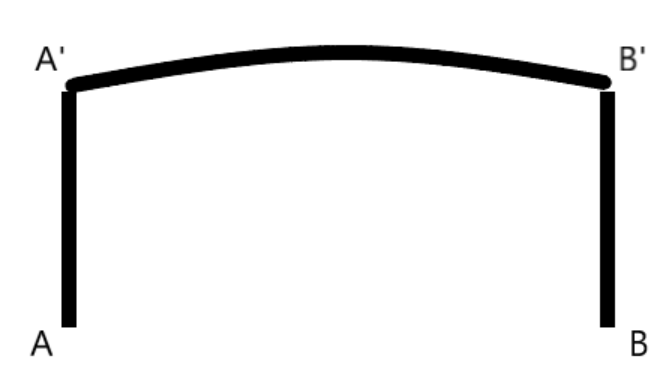
【论坛】基本搬送プログラム作成:門形枠式軌跡
ロボット応用の中で、最も一般的なのは搬送作業です。門形枠式軌跡は搬送任務の基本であり、各種形式の運動軌跡は門型枠軌跡を基本として変化したものである。ワークロード、ワークアンロード、パレタイジングなどの…
分享
手机扫码分享
复制链接
0
548
6.
【论坛】【ECJP013】システムとサーボのアップデートの方法
1.事前にロボットの基本情報を記録l ロボットのユーザー権限を「管理者」に設定します。 l システムソフトウェアとサーボファームウェアのバーションを確認して記録します。(写真撮影等)l ロボットの機械的原点パ…
分享
手机扫码分享
复制链接
0
675
7.
【论坛】如何使用SFTP相关软件传输机器人程序
机器人SFTP端口的基本信息:IP:192.168.1.200(实际使用过程中为机器人的实际ip地址)端口号:22用户名:root密码:elite2014以下几种方法均需保证机器人和电脑在同一局域网,并且网络良好(可以ping通)VsCodeSftp文件传输插件-SFTP…
分享
手机扫码分享
复制链接
0
7131
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件