EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】使用模拟量改变速度倍率
如果想通过模拟量输入来改变机器人的速度倍率,可以使用如下程序:global type = "current" def t1(): while (True): av = get_standard_analog_in(0) if (type == "current"): percent = (av - 0.004) / 0.016 elif (type == "voltage"): …
分享
手机扫码分享
复制链接
0
1230
2.
【论坛】JBI和LUA中实现基于透传的直线插补(可任意设置速度)
希望示教2个点(起点和终点姿态不一样),可以设定运行速度,通过透传TT实现末端直线的插补(包括姿态的SLERP平滑插补),可以使用以下jbi和lua代码JBI代码如下:NOP SETJOINT P000 11.6717,-82.5665,70.2302,-74.1454,73.4545,12.1825 // P000 开始…
分享
手机扫码分享
复制链接
0
1041
3.
【论坛】微段Movml/时间戳运动 和透传的区别
微段Movml/时间戳运动:均受机器人运行速度百分比的影响 JBI中的微段Movml,需事先离线生成点位,点位之间的时间间隔相同。在点位.jbi中只需设置时间间隔,例如10ms SDK中的时间戳功能,需事先离线生成点位,每个点位有对应…
分享
手机扫码分享
复制链接
0
3462
4.
【论坛】SDK中时间戳TrajectoryService的使用
时间戳TrajectoryService为EC SDK中向用户提供的高级功能。用户可以离线做轨迹规划,生成带时间戳的轨迹点(joint或者笛卡尔坐标)。时间戳最小粒度可达1ms例如要实现以下轨迹,其中用户自行规划圆的轨迹(生成带时间戳的点位轨迹,例如基于ROS等)带时间戳的轨迹调整速度方式:缩小时间戳间隔,增加机器人整体百分比速度,更改开始时间戳运动speed_percent的参数python上位机示例代码如下:
分享
手机扫码分享
复制链接
0
1513
5.
【论坛】透传(外部实时控制)在sdk中的使用
透传(transparent transformation)是艾利特机器人EC系列中高阶的运动指令接口,允许用户自己设计并运行一段固定或者实时变化的路径。这项功能使用户可以完全控制运动路径的插补方式与运动速度,也可以在搭载了传感器和控制…
分享
手机扫码分享
复制链接
0
2269
6.
【论坛】透传(外部实时控制)在JBI与LUA中的使用
透传(transparent transformation)是艾利特机器人EC系列中高阶的运动指令接口,允许用户自己设计并运行一段固定或者实时变化的路径。这项功能使用户可以完全控制运动路径的插补方式与运动速度,也可以在搭载了传感器和控制…
分享
手机扫码分享
复制链接
0
2334
7.
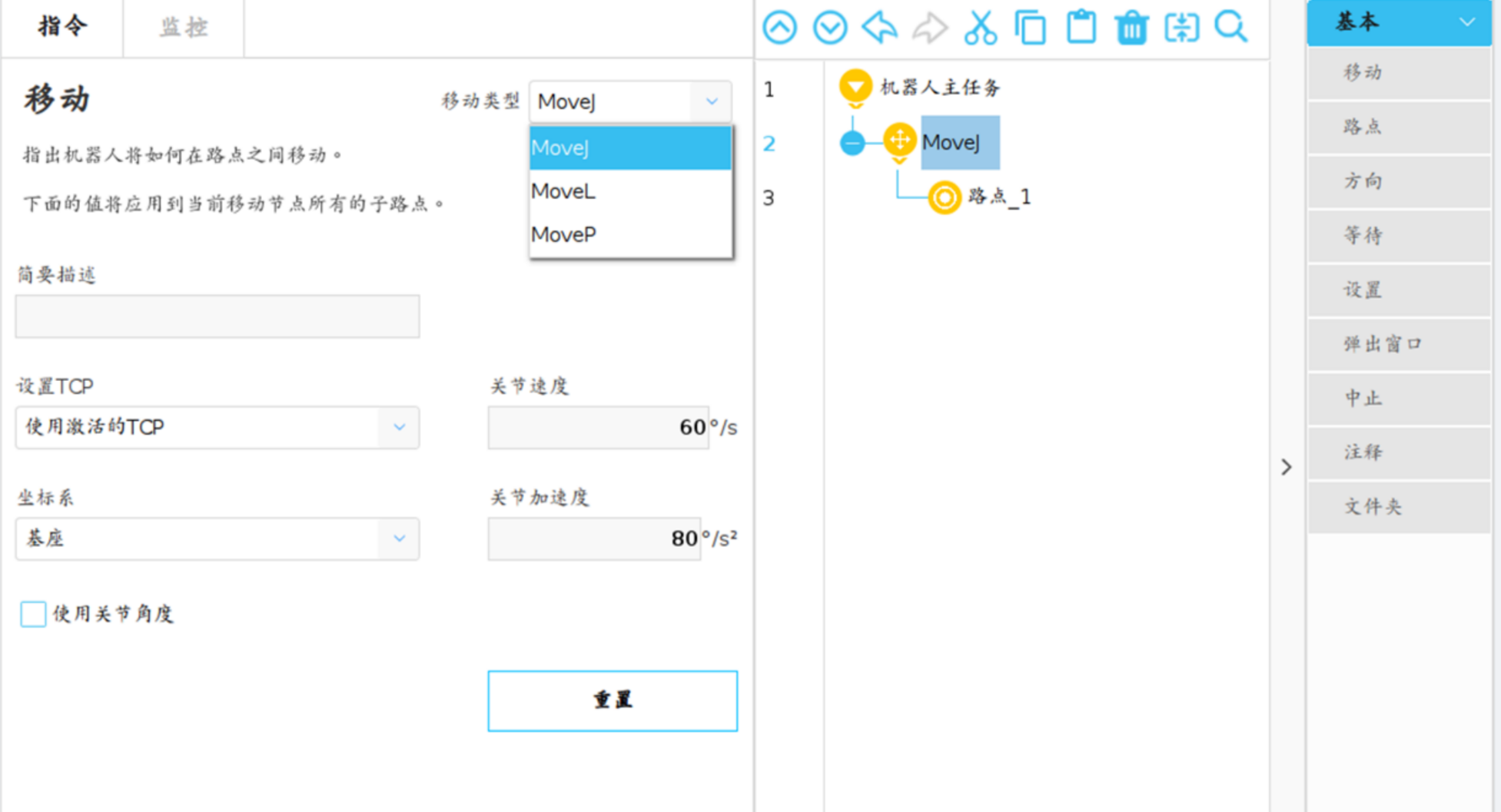
【论坛】CS机器人常用移动指令:关节、直线、工艺、圆弧
MoveJMoveLMovePMoveC路径:在任务-基本-移动中可选择不同的移动方式。具体参数可在左侧“指令”栏设置。【MoveJ】关节运动【MoveL】直线运动【MoveP】工艺运动:可以使TCP以恒定速度进行移动。默认情况下,所有路点使用相同的转…
分享
手机扫码分享
复制链接
0
1931
8.
【论坛】艾利特机器人工具最大速度问题
艾利特机器人产品手册上,标注的EC63,EC66,EC612机器人工具最大速度分别是2.0m/s,2.8m/s 3.2m/s,但是根本达不到,这是为啥?
分享
手机扫码分享
复制链接
1
1006
9.
【论坛】协作机器人安全问题
我们需要机器人在运行中保持较高的速度,但肯定有人员进出。我们希望把机器人设置到较高的安全等级,但不希望牺牲速度。也不希望机器人因为加减速产生的较高电流频繁发生急停。
分享
手机扫码分享
复制链接
1
881
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件