EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
所有分类
通用发布
机器人功能使用
二次开发
通讯
基础使用
所有标签
电动夹爪
CS
RoboDK
EC
大寰
Profinet
SFTP
json
推荐
最新
最热
1.
置顶
EC3.5与EC3.6力控功能使用
使用末端工具I/O端口固件升级:机械臂末端工具IO版本需要更新至v8.2.727及以上的版本sensor介绍a. 目前sensor若使用机器人末端I/O,sensor只支持坤为KWR75B传感器(fx ,fy, fz最大均为200N),sensor介绍见https://www.kunweitech.com/proinfo/58.html。…
分享
手机扫码分享
复制链接
0
1611
2.
置顶
艾利特EC机器人EthernetIP总线通讯
eds文件请联系Elite官方技术支持邮箱:tech@elibot.cn或通过链接:https://pan.baidu.com/s/1WIocIJ_vTFl-AcbVu5oUZQ 提取码:ac2f艾利特EC机器人从V3.5开始正式支持EthernetIP通讯(机器人作为adapter从站)。无需对机器人进行特殊设置,无需设置安…
分享
手机扫码分享
复制链接
0
2945
3.
置顶
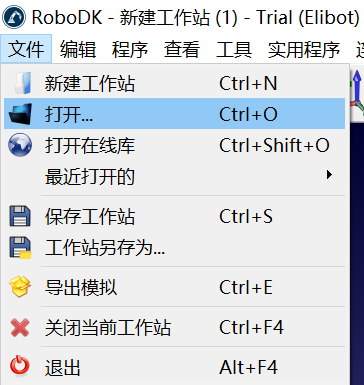
使用RoboDK控制艾利特EC机器人真机移动
艾利特机器人支持使用RoboDK进行仿真,通过驱动ElibotDriver可以让RoboDK模型和机器人真机同步位姿,拖动模型可使机器人自动运行到相应位置。具体操作如下:1. 将ElibotDriver.py放置到RoboDK的安装路径,默认路径:C:\RoboDK\api\Robot2. …
分享
手机扫码分享
复制链接
14
3733
4.
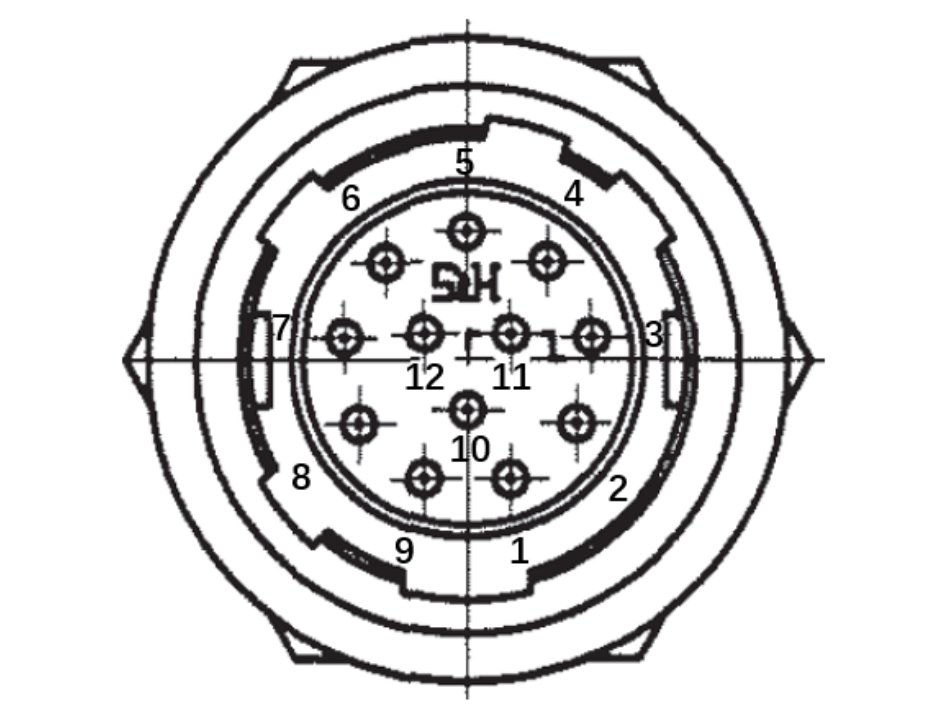
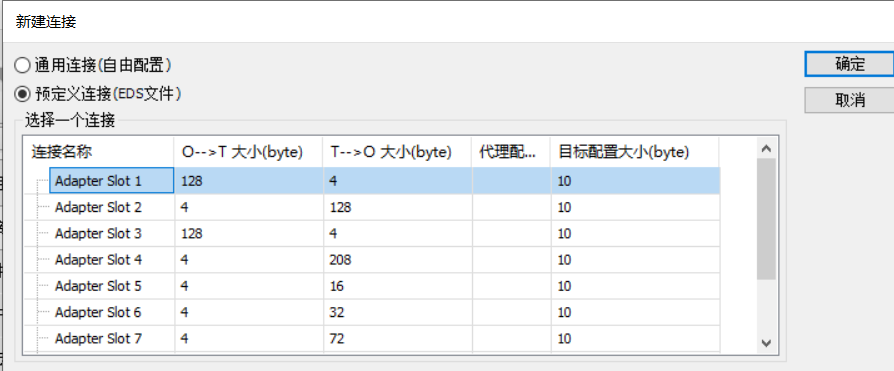
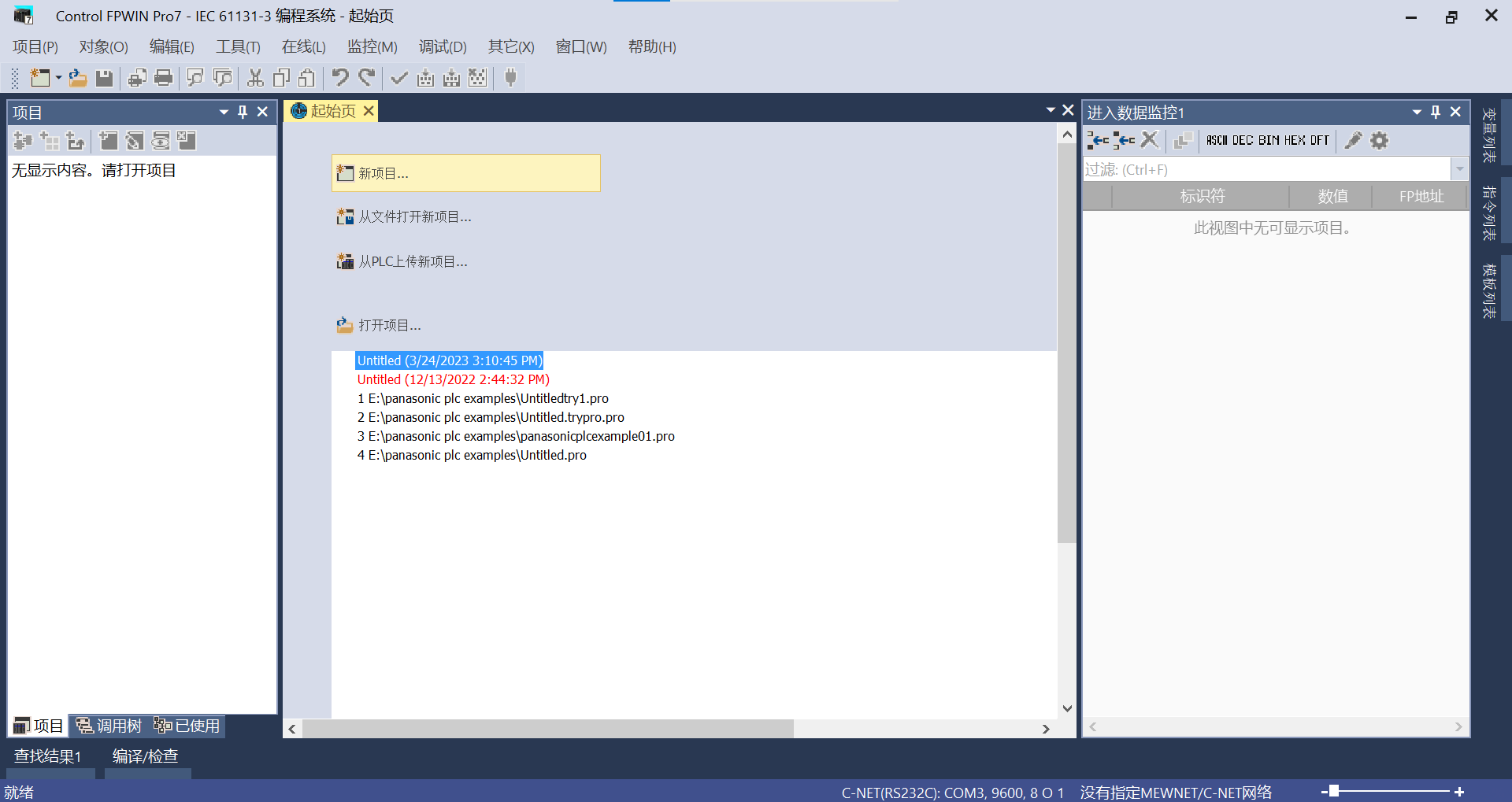
艾利特EC机器人使用EtherNet/IP连接松下PLC
eds文件请联系Elite官方技术支持邮箱:tech@elibot.cn或通过链接:https://pan.baidu.com/s/1WIocIJ_vTFl-AcbVu5oUZQ 提取码:ac2f本文使用松下FP-XH 32K C40ET。 打开松下PLC相应软件,选择“新项目”。注意PLC机型需与实际一致。本文语言使用LD(…
分享
手机扫码分享
复制链接
0
1760
5.
艾利特EC机器人使用基恩士keyence PLC(EtherNet/IP)
艾利特EC机器人支持使用基恩士PLC, 本文将以通过EtherNet/IP方式、KV-8000为例。1. 接线通过USB 2. 配置步骤打开所使用的基恩士PLC对应的软件,由于本例中使用USB线连接,上方通信方式选择…
分享
手机扫码分享
复制链接
0
1216
6.
EC系列如何不使用U盘进行软件升级
对于EC机器人系列,系统升级分为软件升级和固件升级,本文仅介绍软件升级。软件升级方法除了常见的使用USB插入控制箱接口进行升级外,在无法使用U盘的情况下,可以使用下面介绍的方法。请注意操作需谨慎,本方法直接访…
分享
手机扫码分享
复制链接
0
1457
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册协议》条款
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件