EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】CS打包程序
一、新版软件打包方式 在机器人正常模式下,在进行打包之前请先将末端和本体上线缆全部拆除,打开配置→通用→打包位→移至默认打包位二、旧版软件打包方式 不同机器人有不同的打包姿态,可以 连续单击下图所示位置5次,并输入密码 elite或elibot,进入专家模式,并使用 移动至打包位按钮
分享
手机扫码分享
复制链接
0
1610
2.
【论坛】JBI和LUA中实现基于透传的直线插补(可任意设置速度)
希望示教2个点(起点和终点姿态不一样),可以设定运行速度,通过透传TT实现末端直线的插补(包括姿态的SLERP平滑插补),可以使用以下jbi和lua代码JBI代码如下:NOP SETJOINT P000 11.6717,-82.5665,70.2302,-74.1454,73.4545,12.1825 // P000 开始…
分享
手机扫码分享
复制链接
0
1034
3.
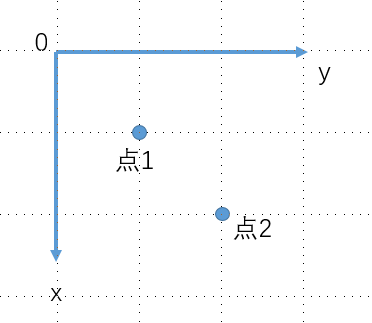
【论坛】如何使用JBI,使机器人末端绕着固定坐标系旋转
绕着固定点旋转(基于TCP方向或者base或者用户坐标系方向),需注意,V变量需跟随工具坐标变化而变化,如果想得到比较好的旋转效果,需正确的设置TCP位置,并更新当前TCP的记录点(V10).附代码:NOP // 基于当前TCP记录开始…
分享
手机扫码分享
复制链接
0
866
4.
【论坛】SDK中实现绕末端TCP点旋转
若希望机器人绕当前TCP末端旋转啊一定角度,包括参考TCP方向或者base方向,可以使用以下代码计算并运动
分享
手机扫码分享
复制链接
0
992
5.
【论坛】力在工具坐标系和base坐标系下的转换
如果通过传感器(例如力sensor固定安装在工件底部)获得的是参考机器人BASE坐标系方向的力,可以通过以下函数将力和扭矩转化到当前工具TCP末端。如果通过传感器(例如力sensor安装机器人末端工具上)获得的是参考机器人TCP…
分享
手机扫码分享
复制链接
0
828
6.
【论坛】利用相机自动修正机器人TCP
TCP表示机器人当前使用的工具末端在法兰盘坐标系下的xyzabc的偏差。例如MOVEL V=50.0MM/S CR=0.0MM TOOL#(1) USER#(1) V001 表示机器人用当前工具末端的TCP(TOOL1数据),走到USER1坐标系下的点1(V001:x,y,z,a,b,c)的位置,例如下图。此时,若机…
分享
手机扫码分享
复制链接
0
1508
7.
【论坛】CS机器人末端与DH手抓modbus_rtu通讯
CS机器人末端与DH手抓modbus_rtu通讯1假设当前使用的DH抓手通讯速率如下,则在CS机器人的的工具IO设置界面,按照如下设置2可以使用如下代码,控制夹爪打开/关闭或者自定义行程。使用时,可以直接示教器界面插入脚本,代码行…
分享
手机扫码分享
复制链接
0
1702
8.
【论坛】EC适配鑫精诚力控sensor
1. 把sensor安装到机器人法兰,485接线可以接到机器人末端法兰(建议升级到V3.9版本)或者直接接到控制柜的RS485口2. 根据鑫精诚sensor手册,机器人发送"0910461C00020400000000C2F5"可以清零sensor,发送"0910019A0001020000CCAA",sensor会以100hz频…
分享
手机扫码分享
复制链接
0
1318
9.
【论坛】EC基于力控的搜索与装配
1. EC机器人支持力控功能,具体见 https://bbs.elibot.cn/forum/detail/topic/181.html 和 https://bbs.elibot.cn/forum/detail/topic/191.html2. 以上为机器人使用简易螺旋线,以固定向下2n的力进行搜索,当机器人末端位姿的z小于设定值,可以认为机器…
分享
手机扫码分享
复制链接
0
2062
10.
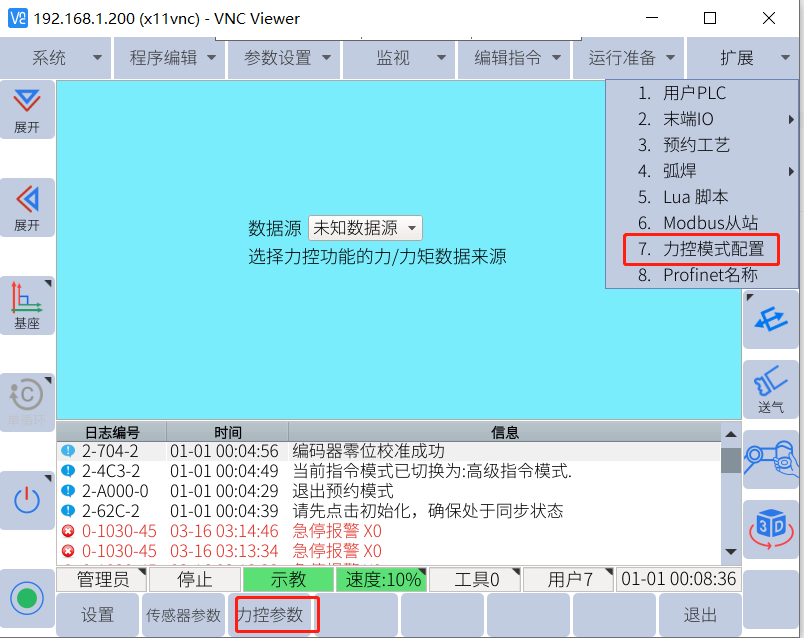
【论坛】EC3.7版本基于sensor的力控增加跟踪增益调节功能
EC机器人升级到V3.7版本后,若使用末端外部力sensor或者外部力sensor,可以进入以下界面设置力跟踪效果。0表示跟踪增益很弱,1表示跟踪增益非常强
分享
手机扫码分享
复制链接
0
1349
11.
【论坛】CS机器人mdh模型数据
CS机器人采用MDH模型,采用以下顺序计算 Rx(alpha) * Dx(a) * Rz(theta) * Dz(d)CS63机器人CS66机器人CS66F机器人(内置力控传感器,末端稍厚)CS612机器人CS620机器人CS625机器人
分享
手机扫码分享
复制链接
0
1799
12.
【论坛】EC3.5与EC3.6力控功能使用
使用末端工具I/O端口固件升级:机械臂末端工具IO版本需要更新至v8.2.727及以上的版本sensor介绍a. 目前sensor若使用机器人末端I/O,sensor只支持坤为KWR75B传感器(fx ,fy, fz最大均为200N),sensor介绍见https://www.kunweitech.com/proinfo/58.html。…
分享
手机扫码分享
复制链接
0
2926
13.
【论坛】EC机器人正运动学计算
机器人正运动学为通过机器人各关节角度计算出末端的笛卡尔空间值(xyz abc)EC机器人采用DH表示方法,对应平移和旋转顺序如下:Elibot using DH modeling, d→θ →a→α (TzRzTxRx),即先绕固连坐标系的Z平移,再绕Z旋转,再绕新的X平移…
分享
手机扫码分享
复制链接
0
1575
14.
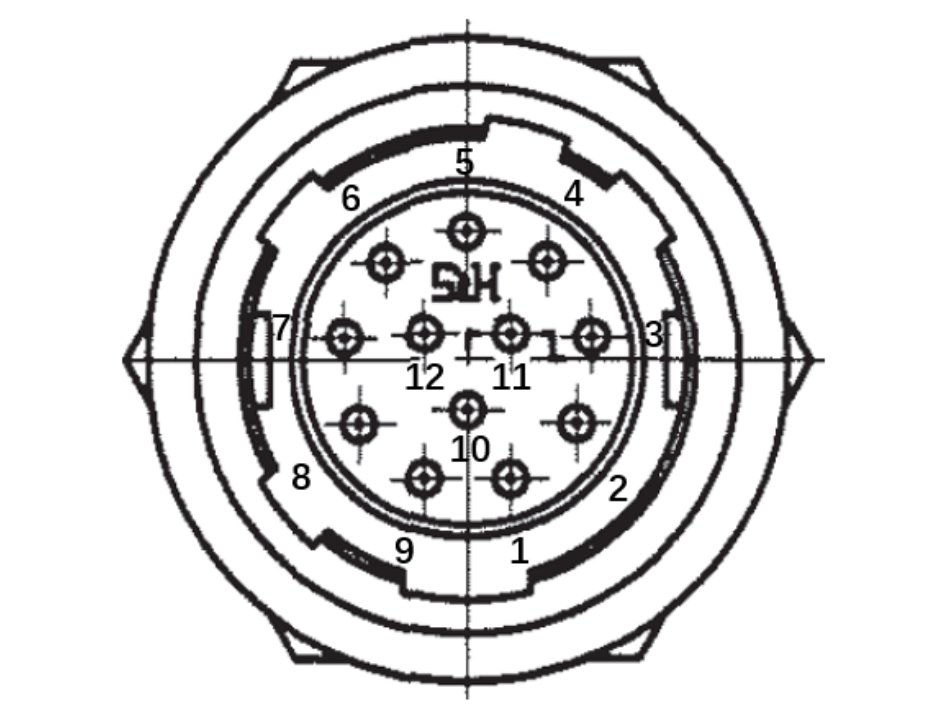
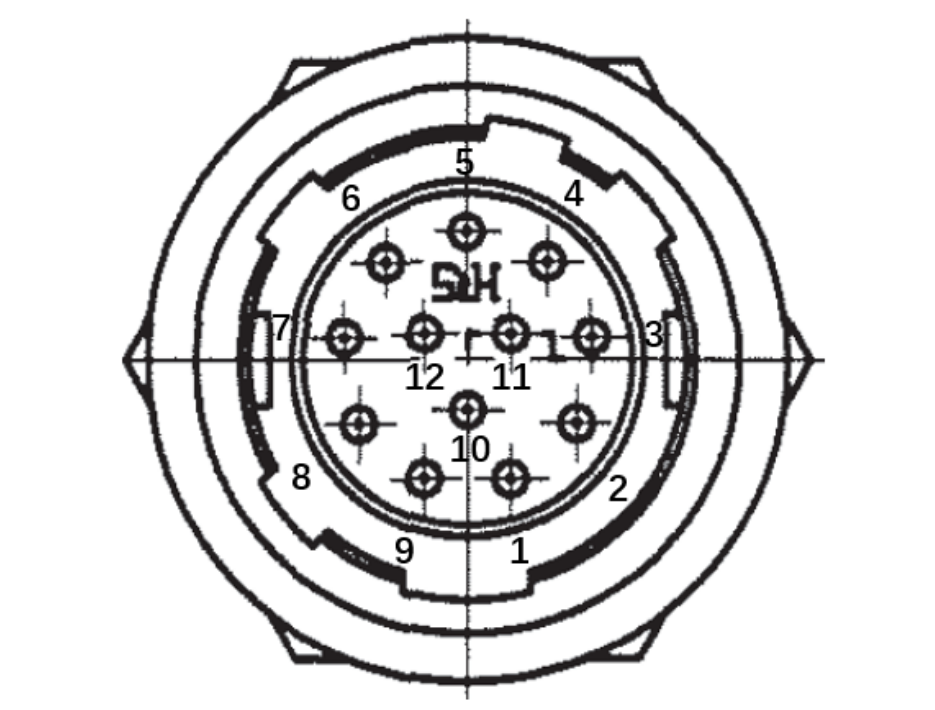
【论坛】EC系列机器人末端针脚介绍
末端针脚图1为插座型号为HR10A-10R-12P,对应插头为HR10A-10P-12SEC系列机器人末端默认为公头 图1. 针连接器末端针脚功能列表 …
分享
手机扫码分享
复制链接
1
1498
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件