EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】CS增加轨迹复现插件
拖动机器人时,需要记录机器人运行轨迹,运行任务时复现轨迹建议测试方法:轨迹记录最大可记录141330个点位轨迹记录时 发生报警、下电等机器人状态、安全状态改变时自动结束记录轨迹文件默认名称为trajectory,如果输入或默认名称轨迹文件已存在时将自动命名,命名格式为trajectory_1、trajectory_2一直累加轨迹文件亦可选择已有的轨迹文件“重新记录” 时将覆盖原有文件内容
分享
手机扫码分享
复制链接
0
1083
2.
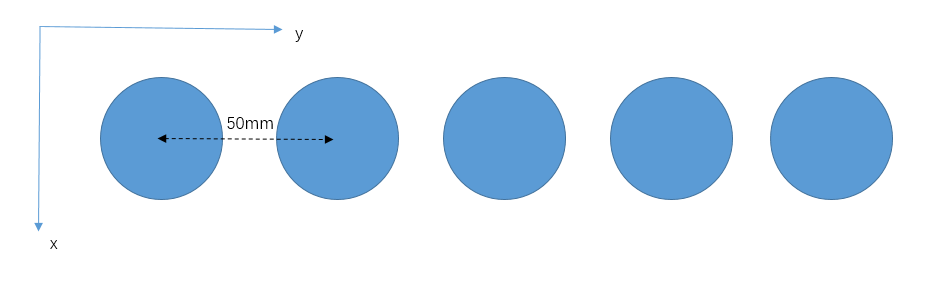
【论坛】阵列画圆
现场有若干有规律圆,希望在示教第一个圆的轨迹后,自动完成下图的阵列圆,如何实现?可以参考以下代码,机器人在user1坐标系,例如基于y方向偏移示教的圆的4个点NOP // author:chenliao@elibot.cn // 用tool1在user1坐标系对第一个圆…
分享
手机扫码分享
复制链接
0
757
3.
【论坛】JBI中微段轨迹MOVML的使用
可以通过离线仿真软件或者LUA等计算方式,获得等时间间隔的轨迹点(例如每10ms,最小可至1ms)。这些轨迹点位可以是Joint或者笛卡尔空间的。机器人基于以上离线轨迹,可以方便实现匀速运动(例如等时间等距离的轨迹)机器…
分享
手机扫码分享
复制链接
0
1469
4.
【论坛】SDK中时间戳TrajectoryService的使用
时间戳TrajectoryService为EC SDK中向用户提供的高级功能。用户可以离线做轨迹规划,生成带时间戳的轨迹点(joint或者笛卡尔坐标)。时间戳最小粒度可达1ms例如要实现以下轨迹,其中用户自行规划圆的轨迹(生成带时间戳的点位轨迹,例如基于ROS等)带时间戳的轨迹调整速度方式:缩小时间戳间隔,增加机器人整体百分比速度,更改开始时间戳运动speed_percent的参数python上位机示例代码如下:
分享
手机扫码分享
复制链接
0
1506
5.
【论坛】lua中位置数组与JBI交互
例如机器人在lua中通过socket接收到一段轨迹点位并保存数组,则lua和jbi可以通过交互,在jbi中使用lua中的点位数组相关lua代码如下:sleep(0.3) Pose_arr = {{400,12.543,25.9139,2.30554,-0.00000,-3.14159}, {400,25.9819,36.2783,2.48465,-0.00000,-3.14159}, {400,…
分享
手机扫码分享
复制链接
0
1247
6.
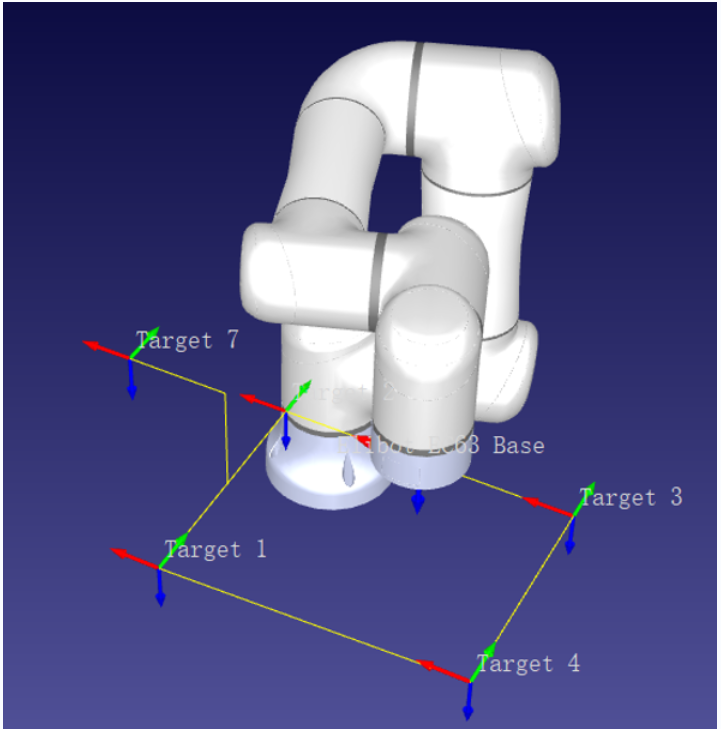
【论坛】EC机器人中断轨迹恢复功能
https://pan.baidu.com/s/1l-Pvr1CMtAII-BNGZbdHXg?pwd=Bu5C提取码:Bu5C. 机器人正常轨迹为Target_1-->Target_2-->Target_3-->Target_4-->Target_1。2. 机器人在运行Target_1-->Target_2路径时,收到外部信号,此时机器人停止运动,并去Target_7进行Home作业。3. 机器…
分享
手机扫码分享
复制链接
1
1231
7.
【论坛】LUA生成JBI轨迹程序文件
例如LUA 接收到机器人的一段轨迹点位,那么可以通过lua讲点位转成JBI程序轨迹。前台JBI只需要等待lua转化完,并调用新的轨迹即可。JBI程序,NOP SET B001 0 TIMER T=1 S SET B001 1 // 请求lua开始转化并生成 轨迹jbi程序 // 等待lua转化完成 …
分享
手机扫码分享
复制链接
0
1247
8.
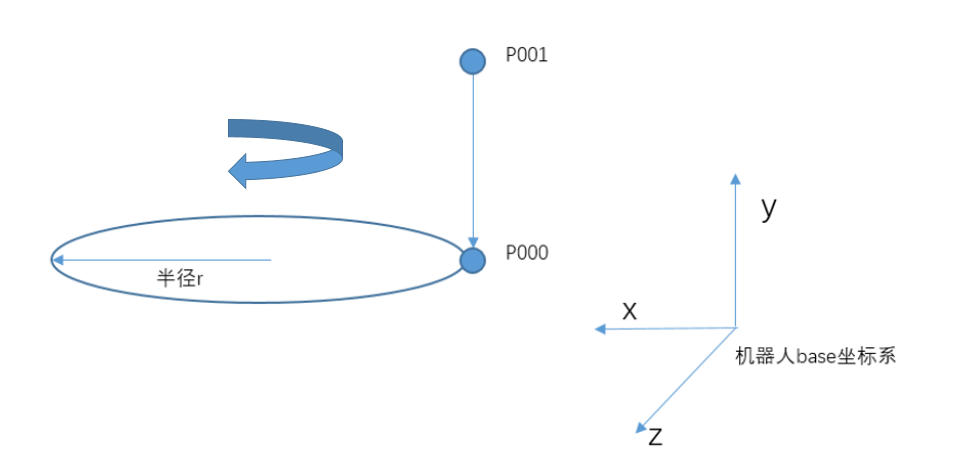
【论坛】机器人以相对固定姿态画圆
如上图,希望机器人示教圆心位置(工具tcp的z与坐标系的z对正),设定圆的半径以及相对坐标系z的夹角,实现上图画圆效果(过程中机器人tcp某个方向一直沿着圆轨迹的切线方向行进)。可以使用以下JBI及lua代码机器人JBI代码…
分享
手机扫码分享
复制链接
0
2456
9.
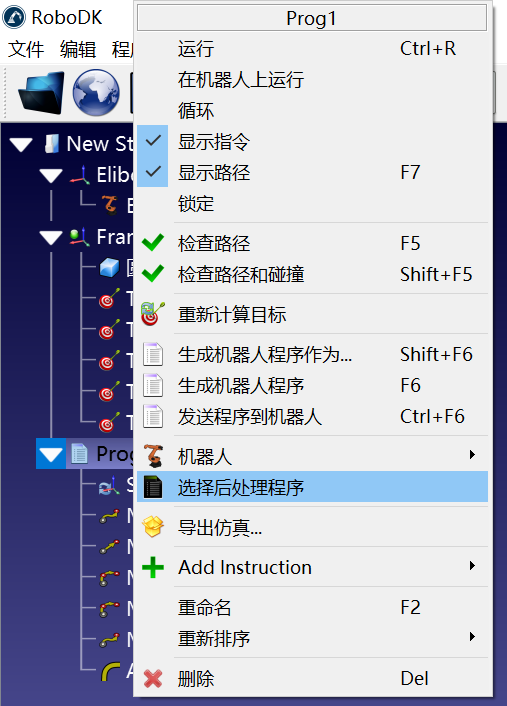
【论坛】使用RoboDK生成CS机器人轨迹.script和.task
目录1. 生成*.script2. 生成*.task 基坐标系下 用户坐标系下1. 生成*.script1. 将Elibot_CS_V1.py 放到robodk安装目录的Posts文件夹下,默认路径为C:\RoboDK\Posts2. 在robodk中,导入与真机一致的CS模型,编辑程序完成后右键点击程序,选择…
分享
手机扫码分享
复制链接
0
1918
10.
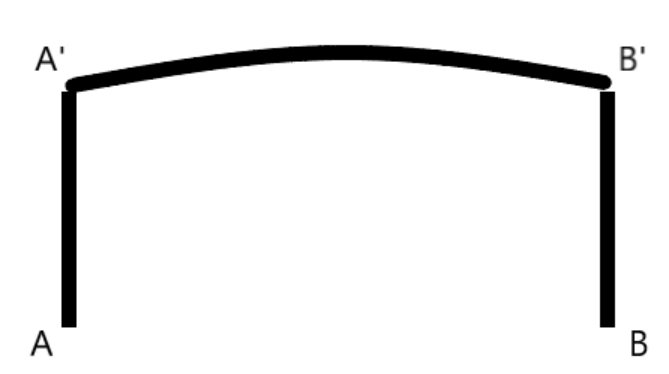
【论坛】基础码垛入门——门型框轨迹变种
文章《基础搬运入门:门型框式轨迹》介绍了以门型框轨迹制作简单的搬运程序的方法。本文将介绍如何以门型框轨迹的概念为核心,变化出简单的码垛程序。轨迹上来看,码垛任务像是多个门型框重叠在了一起,所以只要制作…
分享
手机扫码分享
复制链接
0
1617
11.
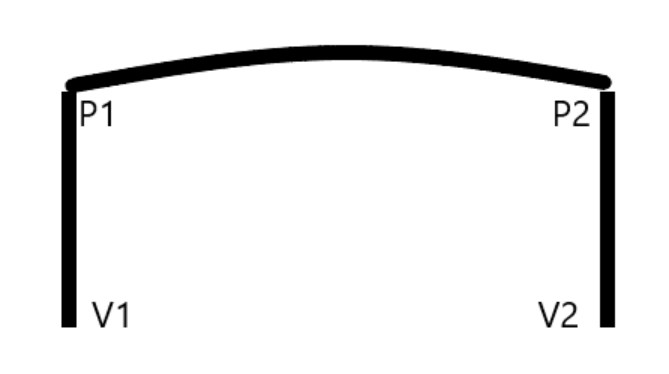
【论坛】基础搬运入门——门型框轨迹
在机器人应用中,最常见的就是搬运任务。门型框式轨迹是搬运任务的基础,各种形式的运动轨迹都是由门型框轨迹为基础变化而来,而上下料、码垛等复杂搬运任务都是将这些门型框变化而来的运动轨迹串联而成的。 当…
分享
手机扫码分享
复制链接
0
3036
12.
【论坛】使用RoboDK自动生成机器人轨迹并在EC真实机器人运行
RoboDK提供了离线轨迹生成功能,配合文末的Elibot后处理程序,就可以将RoboDK生成的离线轨迹直接导入EC机器人使用。1. 将Elite机器人后处理程序 Elibot_V2.py, Elibot_V3.py, Elibot_MovE.py放置到RoboDK安装路径下的Posts文件夹下(区别会在下文…
分享
手机扫码分享
复制链接
0
2799
13.
【论坛】使用RoboDK生成离线的轨迹执行文件
RoboDK是一款应用于工业机器人仿真与离线编程的软件,艾利特EC系列机器人已经支持RoboDK的仿真和离线编程。以下文章将展示如何使用Robodk生成离线的轨迹执行文件。1. 简易安装和使用1.1安装1.2导入模型1.3创建程序2. 后处理2.1生…
分享
手机扫码分享
复制链接
0
2511
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件