EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】【CSEN101】How to create MOBUS RTU communication with tools for CS series robot
CS series support both MODBUS TCP and MODBUS RTU communication,which is the same as EC series. This post describes how to use MOSBUS RTU for tool flange port, a shielded and twisted pair RS485 cable is used. While in real application the robot may act as
分享
手机扫码分享
复制链接
0
1062
2.
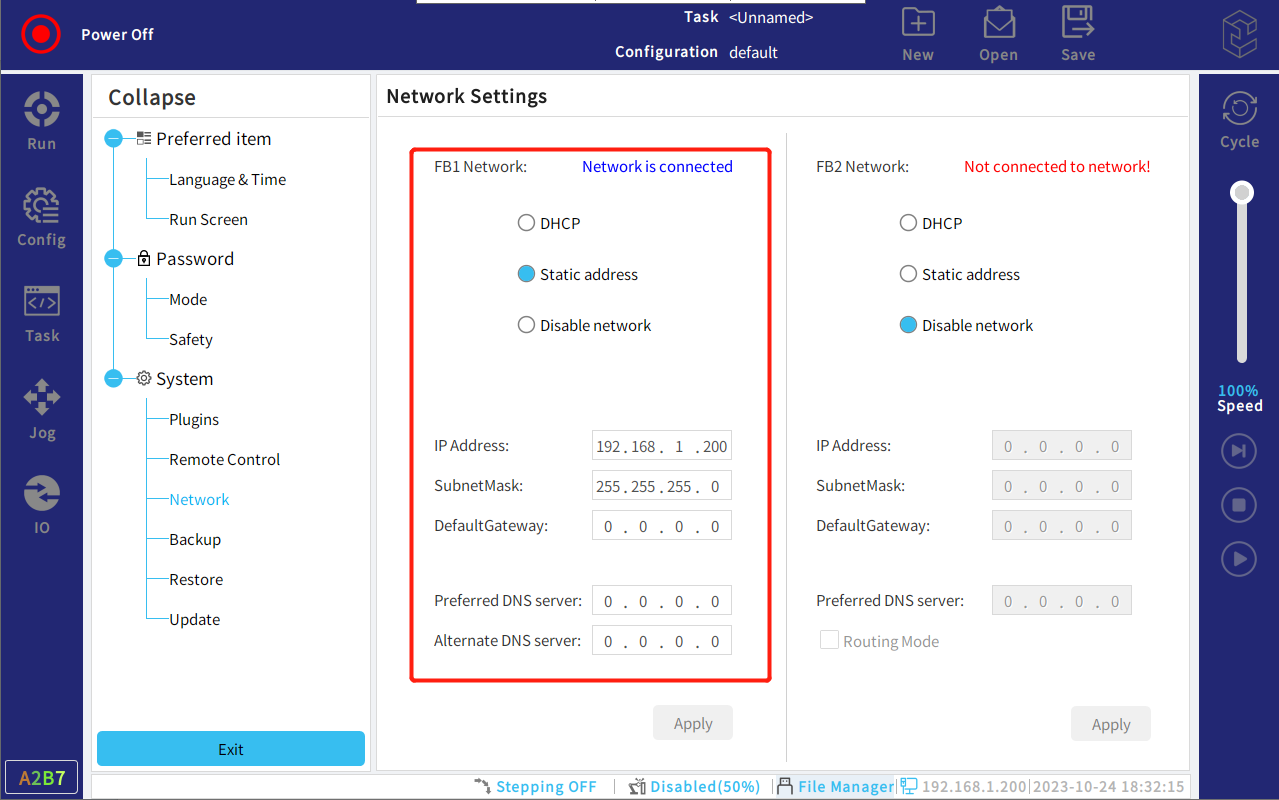
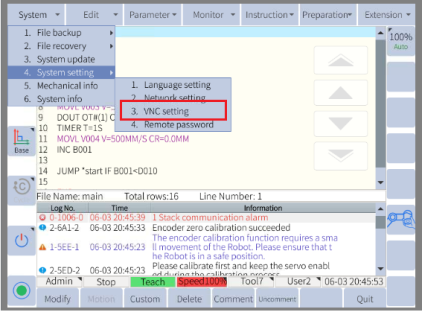
【论坛】【CSEN038】How to connect VNC viewer for CS robot
What is VNC?VNC is an excellent remote control tool. Elite CS series robots have the VNC server build in. The users can view or control the Teach Pendant Interface from PC with Ethernet cable connect to robot controller.How to use VNCDownload Link:VncView
分享
手机扫码分享
复制链接
0
1375
3.
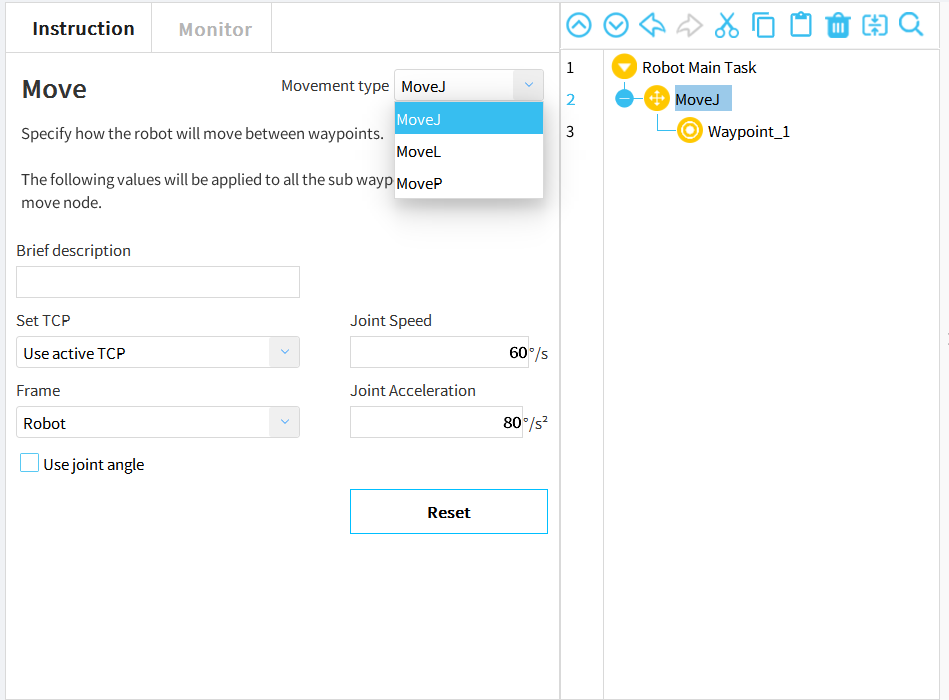
【论坛】【CSEN018】Commonly used movement commands for CS robots
MoveJMoveLMovePMoveCPath: Different movement methods can be selected in Mission-Basic-Movement. Specific parameters can be set in the "Command" column on the left.【MoveJ】Joint movement.【MoveL】Linear movement. Make the tool center point (TCP) move in a str
分享
手机扫码分享
复制链接
0
876
4.
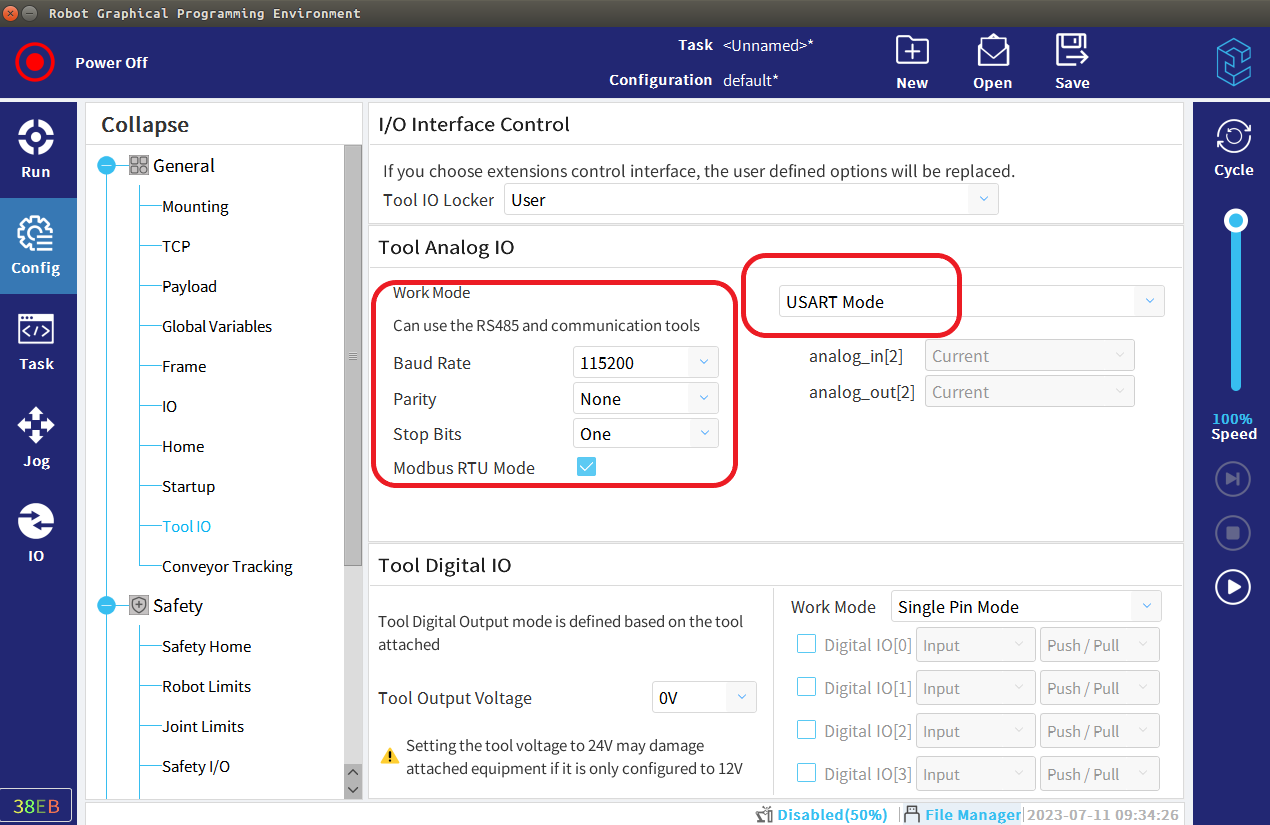
【论坛】【CSEN014】CS Robot end & DH gripper modbus_rtu communication
1. Assume the currently used DH gripper communication rates are as follows, then set the value in tool I/O of CS robot as follows.2. Can use following code to control gripper open or close or customize. When you use the code, can plug in script in pendant
分享
手机扫码分享
复制链接
0
1069
5.
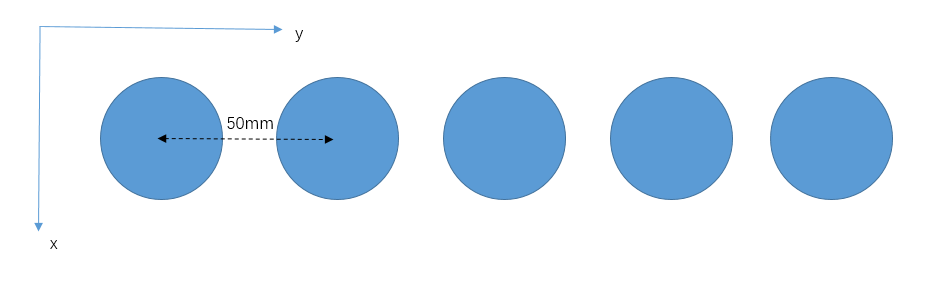
【论坛】阵列画圆
现场有若干有规律圆,希望在示教第一个圆的轨迹后,自动完成下图的阵列圆,如何实现?可以参考以下代码,机器人在user1坐标系,例如基于y方向偏移示教的圆的4个点NOP // author:chenliao@elibot.cn // 用tool1在user1坐标系对第一个圆…
分享
手机扫码分享
复制链接
0
748
6.
【论坛】保存所有工具数据和用户坐标系数据到JBI文件
机器人的工具和用户坐标系数据实时保存到机器人控制器。为避免误修改,可以使用以下lua代码,将所有tool和user数据保存到jbi。用户在使用时,可以在初始化时加载该jbi并初始化tool和user数据-- Author: chenliao@elibot.cn -- May.5, 2023 fu…
分享
手机扫码分享
复制链接
0
981
7.
【论坛】利用相机自动修正机器人TCP
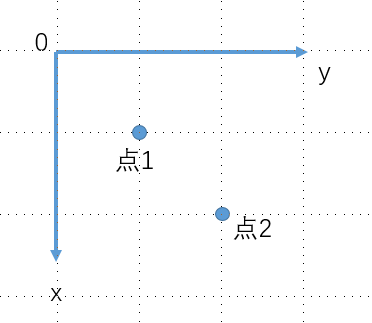
TCP表示机器人当前使用的工具末端在法兰盘坐标系下的xyzabc的偏差。例如MOVEL V=50.0MM/S CR=0.0MM TOOL#(1) USER#(1) V001 表示机器人用当前工具末端的TCP(TOOL1数据),走到USER1坐标系下的点1(V001:x,y,z,a,b,c)的位置,例如下图。此时,若机…
分享
手机扫码分享
复制链接
0
1488
8.
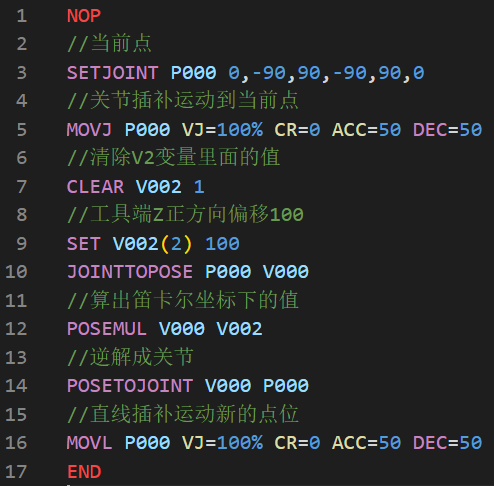
【论坛】ec机器人怎么通过jbi指令,实现基于工具端的偏移运动?
例如:abb指令:MoveL RelTool (p0, 0, 0, 100), v100, fine, tool1;沿工具的z方向,将机械臂移动至距p0达100 mm的一处位置。回答:
分享
手机扫码分享
复制链接
1
1389
9.
【论坛】【ECEN027】MOVE Instructions: Application of Binding Tool Coordinate And User Coordinate
MOVE instructions are the new instructions of Elite EC series released with patch 3.4.1. MOVE instructions carries more parameters than MOV instructions. It cause users to spend more than on configuring carried parameters, but this parameters enables some
分享
手机扫码分享
复制链接
0
941
10.
【论坛】【ECEN020】Robot-Teach Interface with VNC and Web Browser
What is VNC?VNC is an excellent remote control tool. Elite EC series robots have the VNC server build in. The users can view or control the Teach Pendant Interface from PC with ethernet cable connect to robot controller cabinet.Robot system version must b
分享
手机扫码分享
复制链接
0
1504
11.
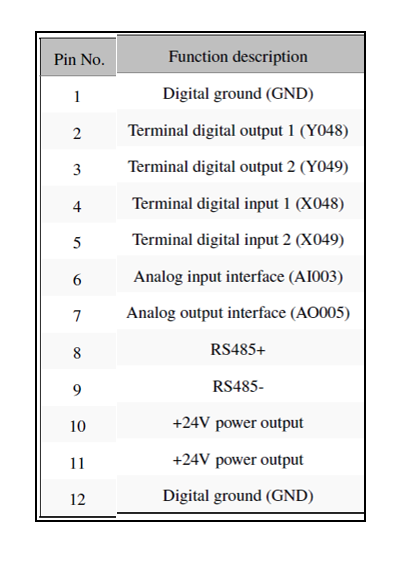
【论坛】【ECEN010】Elibot flange I/O interface
•There are 4 digital I/O and 2 analog I/O interfaces on the robot wrist (flange end). •Communication with tools using RS485 protocol
分享
手机扫码分享
复制链接
1
909
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件