EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
所有分类
通用发布
机器人功能使用
二次开发
通讯
基础使用
所有标签
电动夹爪
CS
RoboDK
EC
大寰
Profinet
SFTP
json
推荐
最新
最热
1.
置顶
EC机器人推出ROS包
ELITE EC系列机器人的ROS开发包已经正式发布,!!!!!ROS包仅针对EC机器人 3.5及以上版本!!!!!!具体的下载地址是, https://github.com/Elite-Robots/ROS.git 或者访问 https://github.com/fishros/elite_robot_ros详细部署步骤和使用方法…
分享
手机扫码分享
复制链接
35
5111
2.
置顶
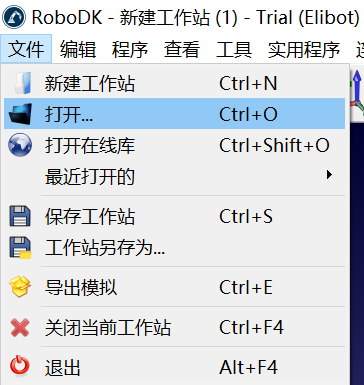
使用RoboDK控制艾利特EC机器人真机移动
艾利特机器人支持使用RoboDK进行仿真,通过驱动ElibotDriver可以让RoboDK模型和机器人真机同步位姿,拖动模型可使机器人自动运行到相应位置。具体操作如下:1. 将ElibotDriver.py放置到RoboDK的安装路径,默认路径:C:\RoboDK\api\Robot2. …
分享
手机扫码分享
复制链接
14
3706
3.
机器人外部启动配置
1 机器人模式介绍艾利特机器人提供三种运行模式,分别为:TEACH(示教)PLAY(自动)REMOTE(远程) 模式描述TEACH(示教)示教模式,在此模式下可以点动机器人、修改参数、创建或修改程序。PLAY(自动)自动模式,执行程序时…
分享
手机扫码分享
复制链接
7
4059
4.
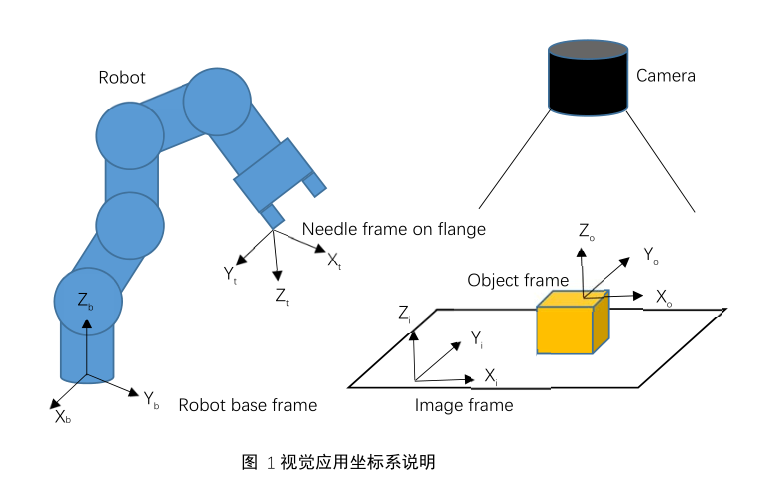
机器人视觉应用
机器人视觉应用按照安装方式分为固定式和机持式,实际上无论是固定式和机持式,对于二维视觉应用来说,整个流程和使用实则是一样的,因为机持式只是机器人每次在一个固定的位置拍照,就跟固定式情况下拍照一样。 …
分享
手机扫码分享
复制链接
5
1600
5.
关于EC66使用sdk断连的问题
您好,我们的EC66机械臂在使用时遇到一些问题,希望能得到解决。我们通过EC_SDK_Socket手册中示例的方式与操作系统为Ubuntu 20.04的主机建立连接(通过网线),但通过主机发指令控制的过程中时常会出现断连的情况,有时候几分…
分享
手机扫码分享
复制链接
4
964
6.
加精
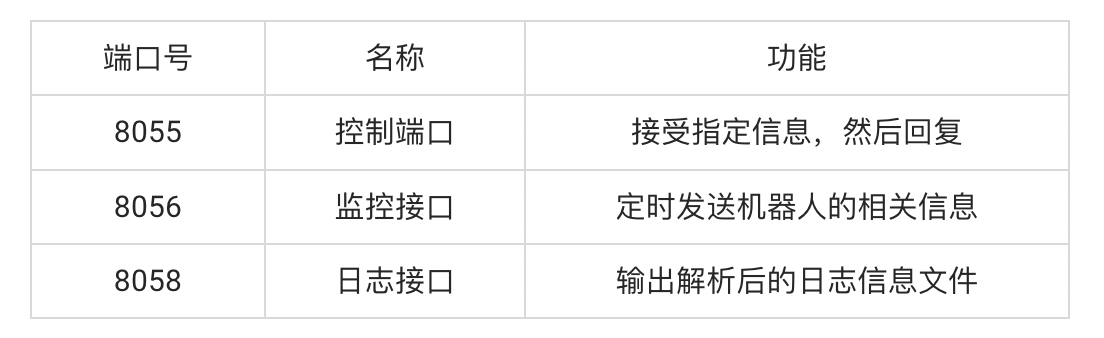
SDK快速Q&A
二次开发介绍Elite机器人的二次开发端口见下图:端口介绍8055Elite 8055端口是通过socket通讯向控制器发送指定格式的json字符串来实现的,其中机器人侧为服务器,上位机为客户端。通过8055端口,几乎示教器上的所有功能都可以实…
分享
手机扫码分享
复制链接
3
4301
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册协议》条款
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件