EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】【CSJP028】ホストPC でグローバル変数を変更する方法のまとめ
ロボット構成インターフェースで新しいグローバル変数 (A9 など) を作成します。グローバル変数の値を取得します。ロボット プログラムが停止しているか実行中であるかに関係なく (ティーチ ペンダントを介したプログラムの開始や、30001 を介して送信された外部スクリプトの実行を含む):ホスト コンピュータは、ポート 29999 で次のコマンドを使用してこのグローバル変数を取得できます。
分享
手机扫码分享
复制链接
0
555
2.
【论坛】CS机器人上位机修改全局变量方法总结
在机器人配置界面新建全局变量,例如A9获取全局变量的值:不论机器人程序处于停止或运行(包括通过示教器启动程序或者运行外部通过30001发来的脚本):上位机均可通过29999端口的以下指令获取该全局变量variable -get A9修改…
分享
手机扫码分享
复制链接
0
1536
3.
【论坛】利用29999,30001和全局变量获取机器人反馈数据
例如,希望获得机器人当前位姿,或者其他数据,在不解析30001/30004返回数据的前提下,可以使用全局变量来实现。1. 在机器人配置中创建全局变量,例如c_pose2. 向30001端口发送以下脚本,也可发送关键字sec开头,end结尾(不打…
分享
手机扫码分享
复制链接
0
2155
4.
【论坛】CS脚本中使用29999端口dashboard
CS机器人29999端口dashboard对外只能使用FB1口。如果想在机器人脚本中使用29999dashboard功能,可以使用如下代码# author: chenliao@elibot.cn # Aug.10, 2023 global b b = socket_open("6.0.0.10",29999,"socket_1") # 真实机器人,脚本中使用29999端口,填写如…
分享
手机扫码分享
复制链接
0
1613
5.
【论坛】上位机触发机器人进入拖动模式
CS机器人可以通过配置DI信号,外部触发机器人进入拖动模式。在机器人程序未运行时,也可以通过以下指令让机器人进入拖动模式:基于29999端口的dashboard:freeDrive -on/-off基于30001端口的:set freedrive mode True
分享
手机扫码分享
复制链接
1
1255
6.
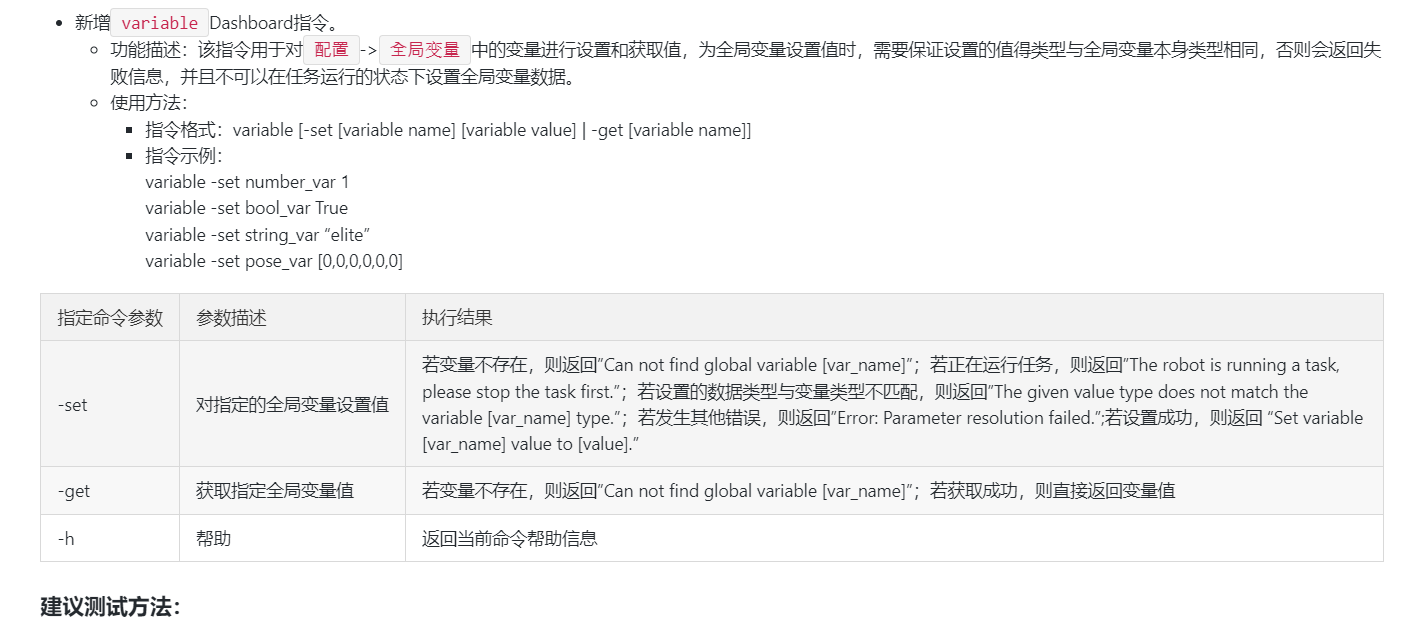
【论坛】CS基于29999端口dashboard设置和获取全局变量
CS机器人升级到2.8后,可以通过dashboard(29999端口),使用如下指令获取和写入全局变量。每条指令以\n 作为结束符例如设置全局变量b1的值为1: variable -set b1 1例如获取全局变量b1的值: variable -get b1
分享
手机扫码分享
复制链接
0
897
7.
【论坛】【CSEN017】Dashboard of CS series: port 29999 (socket(TCP/IP))
EliRobot provides a dashboard shell and supports a large number of query, setting and control commands, allowing users or advanced developers to send commands through TcpSocket to control the EliRobot robot platform. TcpSocket remote connection to the das
分享
手机扫码分享
复制链接
0
1645
8.
【论坛】【CSJP010】CSのダッシュボード29999の使用方法(socket(TCP/IP))
EliRobot はダッシュボード シェルを提供し、多数のクエリ、設定、および制御コマンドをサポートしているため、ユーザーまたは上級開発者は TcpSocket 経由でコマンドを送信して EliRobot ロボット プラットフォームを制御でき…
分享
手机扫码分享
复制链接
0
665
9.
【论坛】CS的Dashboard使用介绍(29999端口)
EliRobot 提供了 dashboard shell,并支持大量的查询、设置及控制命令,允许用户或者高级开发人员通过 TcpSocket 发送命令来对 EliRobot 机器人平台进行控制。TcpSocket 远程连接 dashboard shell 需要通过 TcpSocket 工具、 telnet 命令行、开发代…
分享
手机扫码分享
复制链接
0
2256
10.
【论坛】C#上位机-针对CS机器人
CS机器人提供了丰富的外部接口,包括用户可以通过29999端口对机器人进行启动,停止等操作,以及通过30001端口向机器人直接发送脚本。同时30001端口以10hz频率,向用户返回预先定义好的数据(包括关节位置,位姿等,返回数据…
分享
手机扫码分享
复制链接
0
2301
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件