EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】系统升级
系统升级软件在哪里
分享
手机扫码分享
复制链接
1
871
2.
【论坛】通过网线升级CS系统
下载机器人的升级包 *.eup,并拷贝到linux虚拟机。在当前文件夹,右击open in terminal,输入:./CS_UPDATE_xxxx.eup -ip=xxx.xxx.xxx.xxx,其中xxx为实际机器人的ip地址
分享
手机扫码分享
复制链接
0
1041
3.
【论坛】CS 仿真模式输入IO、寄存器控制功能
机器人需要升级到2.9测试版及以上:CS控制软件支持在PC端,通过仿真运行的方式编写工艺任务文件,并进行仿真。但由于仿真环境中,无法触发输入IO状态,所以一些等待输入IO信号的工艺流程,目前无法在仿真环境中运行,仍…
分享
手机扫码分享
复制链接
0
1202
4.
【论坛】艾利特CS机器人EtherNet/IP总线通讯
艾利特机器人CS系列支持 EtherNet/IP通讯。本文以CODESYS为例。CS机器人eds文件下载:链接:https://pan.baidu.com/s/1QYUQ_xWbrYKs8hz1nE3JLg 提取码:ydmo教学视频:【CS机器人使用EtherNet/IP教学】 注意事项:CS机器人需升级到2.4或以上版本。…
分享
手机扫码分享
复制链接
0
2241
5.
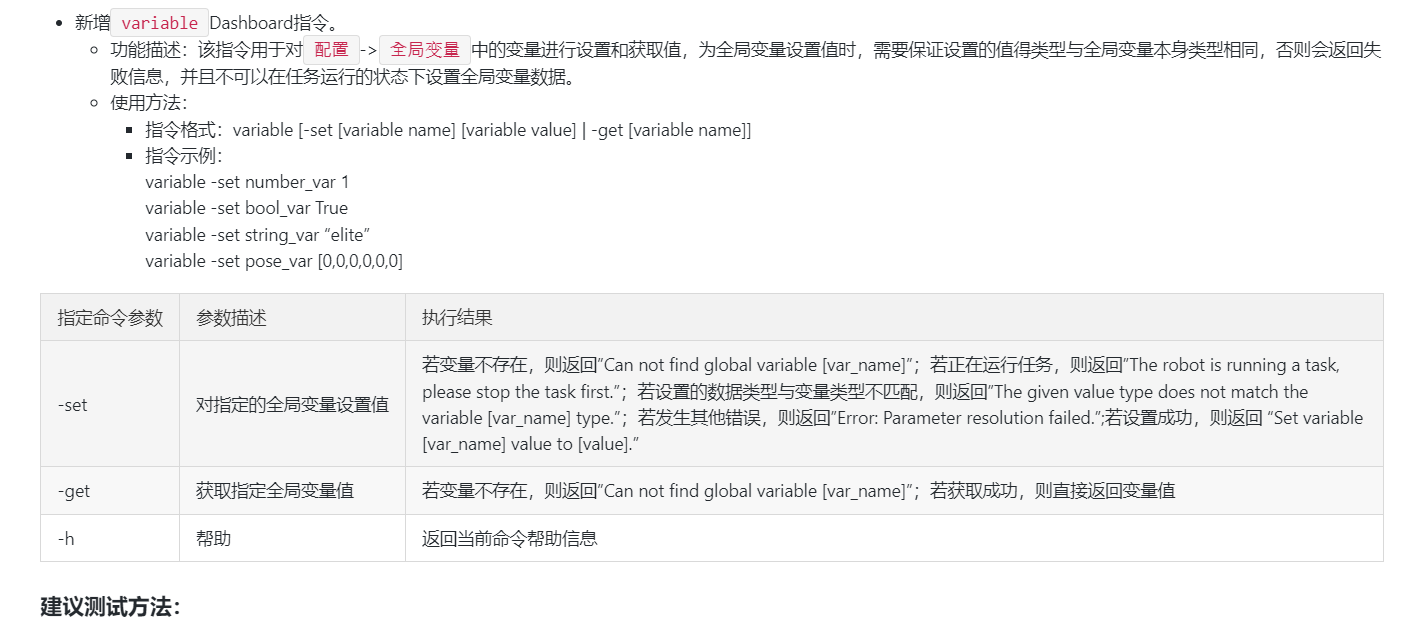
【论坛】CS基于29999端口dashboard设置和获取全局变量
CS机器人升级到2.8后,可以通过dashboard(29999端口),使用如下指令获取和写入全局变量。每条指令以\n 作为结束符例如设置全局变量b1的值为1: variable -set b1 1例如获取全局变量b1的值: variable -get b1
分享
手机扫码分享
复制链接
0
895
6.
【论坛】通过总线组信号选择机器人程序
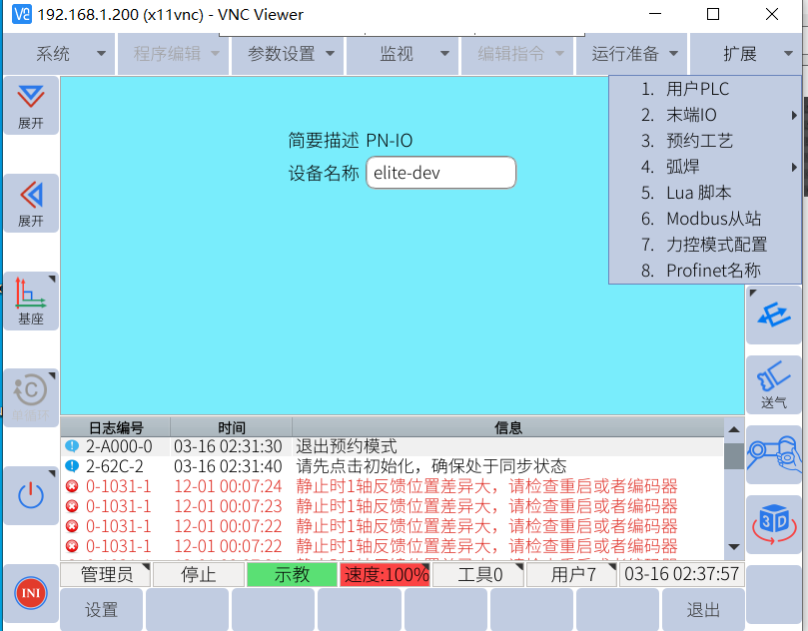
用户希望通过总线(pn,eip等)上的组信号(例如32bit的int等),发送机器人程序号。机器人根据接收到的组信号调用不同程序,同时将接收到的信号发送回PLC,例如下图中的prgNoIn为PLC发送的信号,prgNoOut为机器人返回给PLC的确认信号要在程序任务树中直接使用此类信号(可以在下拉菜单选择),需要现在IO界面对具体信号重命名,如下图。被重命名过的信号,可以在键盘的输入/输出中出线并被选择机器人在实际执行时,会根据设置的信号名和对应的信号地址,自动转化为对应脚本。以上功能需要将机器人程序升级
分享
手机扫码分享
复制链接
0
1336
7.
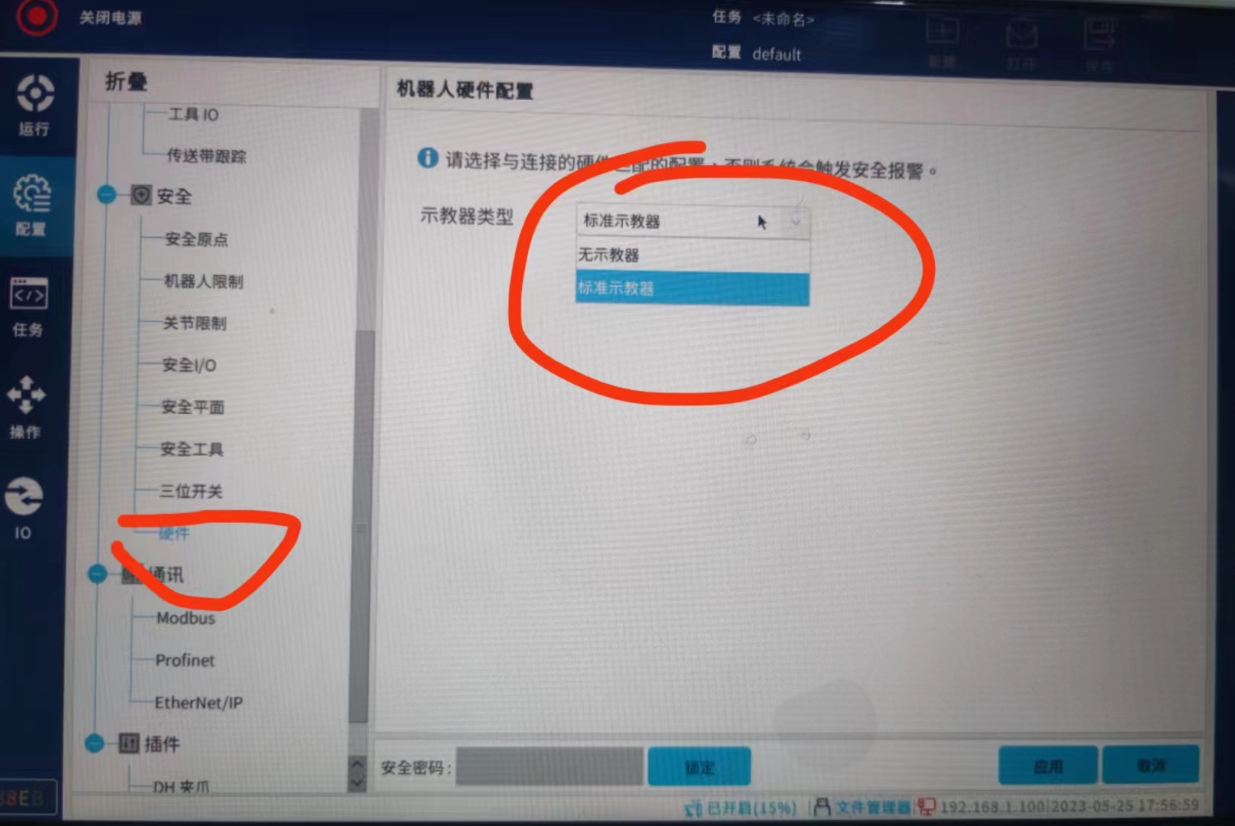
【论坛】CS拔除示教器设置
机器人软件升级到2.5及以上,在用户拔除示教器前,进入以下设置界面,设置示教器类型为: 无示教器设置完毕后即可拔出, 无需做其他硬件连接变动注:用户选择必须与当前真实情况一致,比如用户选择了无示教器,但实际情况却连接了示教器,此时会触发安全故障模式,并报警E9S3,提示用户需要当前设置不匹配。同样的如果用户选择了标准示教器,但此时却没有连接示教器,则会报警E9S1示教器断开连接。
分享
手机扫码分享
复制链接
0
1135
8.
【论坛】CS机器人新增增量移动
CS机器人软件需升级到最新的2.5版本,新增包括:1) 增量移动模式
分享
手机扫码分享
复制链接
0
932
9.
【论坛】CS机器人支持OPCUA
1. 机器人需要升级到V2.5或以上版本。2. 安装OPCUA的插件(下载地址:链接:https://pan.baidu.com/s/1tY6-XtOZuL9cp_L0uY9ysA 提取码:uzc0)3. 具体使用方法,可以参见下载链接里的使用说明.pdf4. 建议使用UAExpert测试建议测试方法:测试可以…
分享
手机扫码分享
复制链接
0
1289
10.
【论坛】EC适配鑫精诚力控sensor
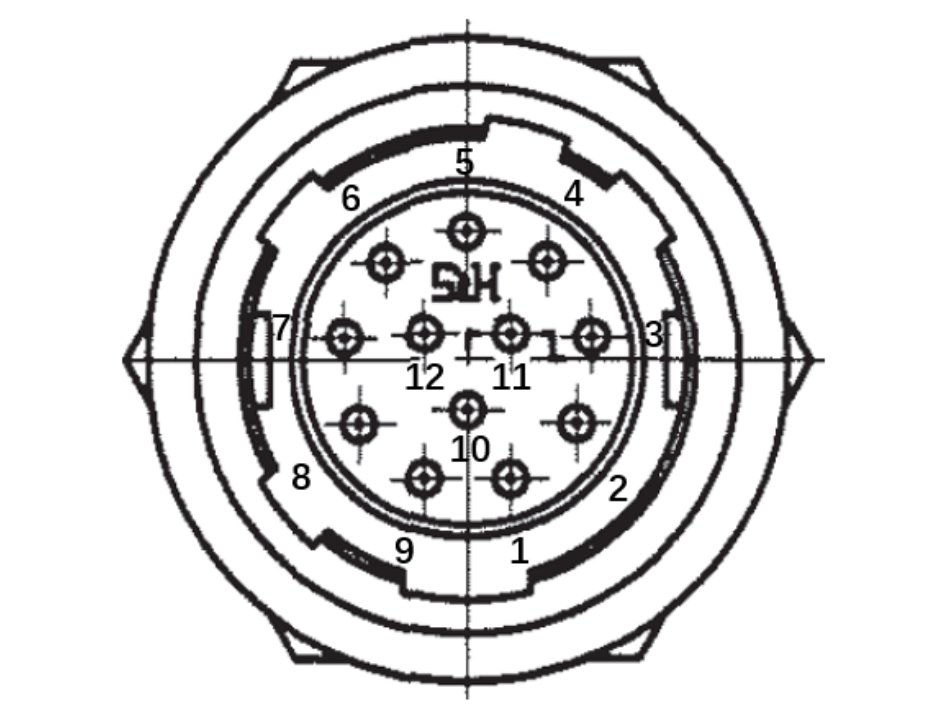
1. 把sensor安装到机器人法兰,485接线可以接到机器人末端法兰(建议升级到V3.9版本)或者直接接到控制柜的RS485口2. 根据鑫精诚sensor手册,机器人发送"0910461C00020400000000C2F5"可以清零sensor,发送"0910019A0001020000CCAA",sensor会以100hz频…
分享
手机扫码分享
复制链接
0
1315
11.
【论坛】EC系列如何不使用U盘进行软件升级
对于EC机器人系列,系统升级分为软件升级和固件升级,本文仅介绍软件升级。软件升级方法除了常见的使用USB插入控制箱接口进行升级外,在无法使用U盘的情况下,可以使用下面介绍的方法。请注意操作需谨慎,本方法直接访…
分享
手机扫码分享
复制链接
0
2010
12.
【论坛】EC3.7版本基于sensor的力控增加跟踪增益调节功能
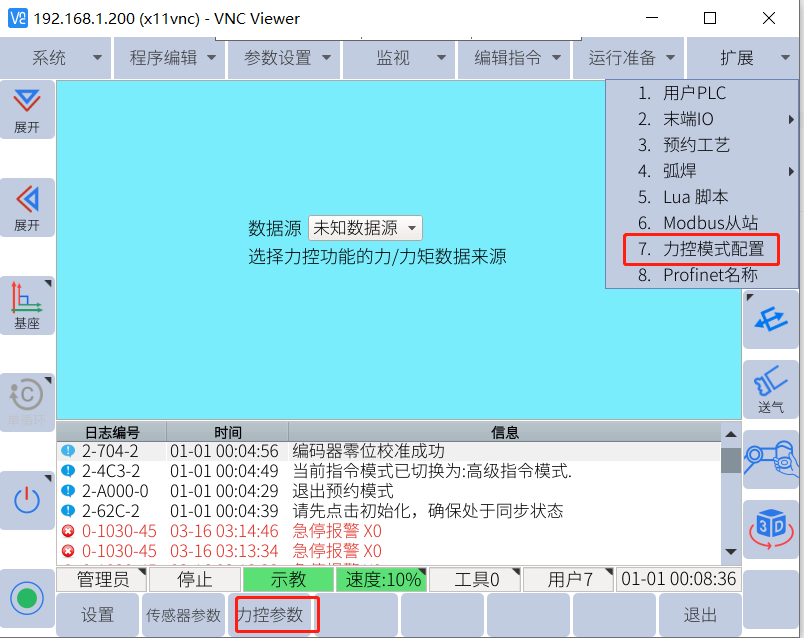
EC机器人升级到V3.7版本后,若使用末端外部力sensor或者外部力sensor,可以进入以下界面设置力跟踪效果。0表示跟踪增益很弱,1表示跟踪增益非常强
分享
手机扫码分享
复制链接
0
1347
13.
【论坛】机器人备份、恢复与升级系统
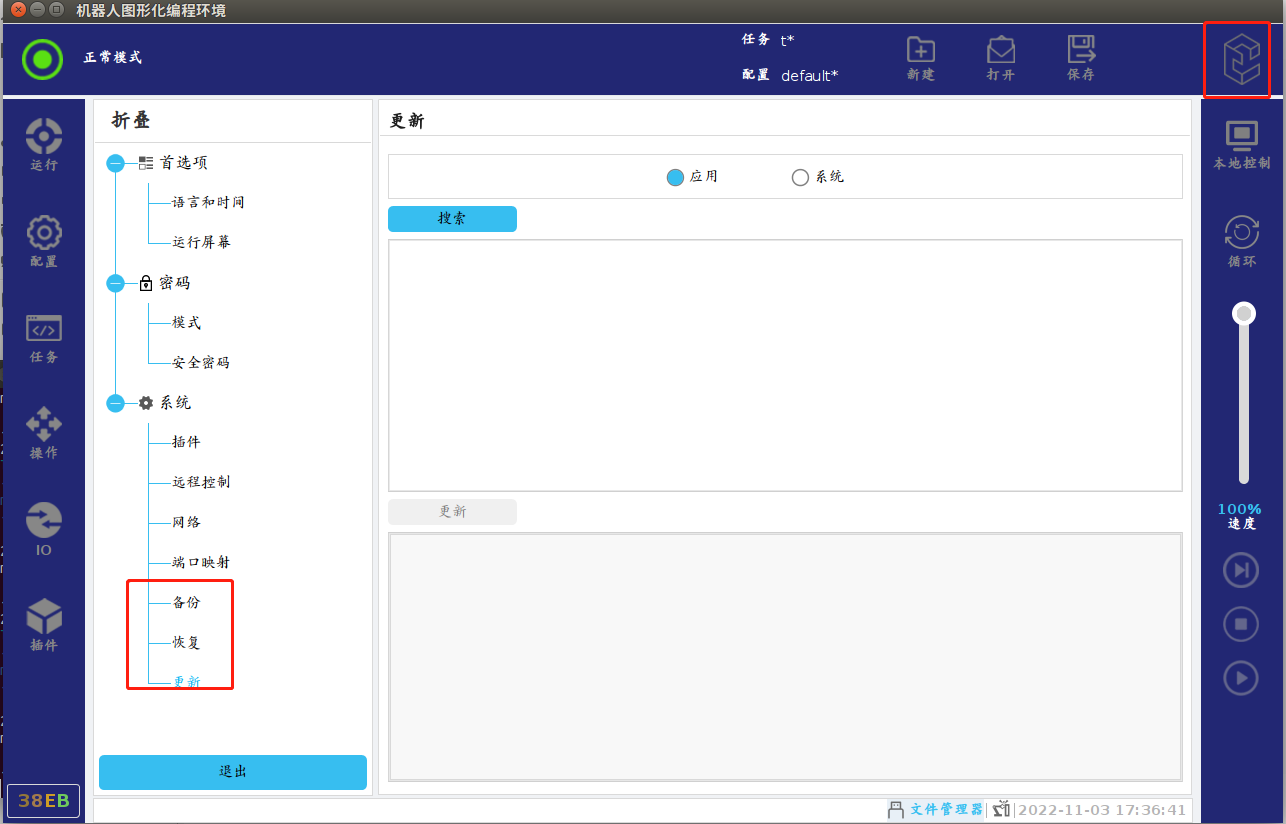
用户可以通过u盘对机器人进行备份、恢复与升级。将u盘插入机器人示教器的usb口,点击示教器右上角 艾利特 机器人图标,点击 设置,点击左下角的 备份、恢复与升级(升级包可以联系艾利特相关技术人员获取)
分享
手机扫码分享
复制链接
0
1351
14.
【论坛】EC3.7 示教器设置机器人PROFINET从站名字
EC机器人升级到3.7版本后,可以在示教器界面设置机器人作为PN从站的名字
分享
手机扫码分享
复制链接
0
1199
15.
【论坛】EC3.5与EC3.6力控功能使用
使用末端工具I/O端口固件升级:机械臂末端工具IO版本需要更新至v8.2.727及以上的版本sensor介绍a. 目前sensor若使用机器人末端I/O,sensor只支持坤为KWR75B传感器(fx ,fy, fz最大均为200N),sensor介绍见https://www.kunweitech.com/proinfo/58.html。…
分享
手机扫码分享
复制链接
0
2924
16.
【论坛】EC机器人支持手动模式自动对齐功能
机器人软件升级到v3.6后,点击示教器的3d试图按钮(如下图),并伺服上电,会出现“对齐基座”和“对齐用户”按钮。此时,点击对应按钮,机器人会将当前工具tcp的z方向自动垂直与基座xy平面或者用户坐标系的xy平面对齐后效果如下图。方便用户调试
分享
手机扫码分享
复制链接
0
1613
17.
【论坛】EC系列机器人升级
1.软件升级当软件需要更新或系统出现故障时,可以进行系统升级。系统升级前应备份现有用户数据。 请注意,用户数据备份不包括机械原位。因此,请在系统升级前拍摄机械原位页面的照片或屏幕截图。详细升级流程如下:准…
分享
手机扫码分享
复制链接
0
2362
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件