EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】EC63示教器是灰的无法点击
分享
手机扫码分享
复制链接
1
736
2.
【论坛】示教器python脚本解析30001返回数据
根据相关手册,可以获取机器人30001返回的所有数据解析。可以使用以下代码,直接复制到示教器运行,即可解析30001返回数据。数据的名称,也可以先将代码置于vscode运行,并设置断点,查看变量名字。在下方使用时,例如直…
分享
手机扫码分享
复制链接
0
1709
3.
【论坛】CS机器人上位机修改全局变量方法总结
在机器人配置界面新建全局变量,例如A9获取全局变量的值:不论机器人程序处于停止或运行(包括通过示教器启动程序或者运行外部通过30001发来的脚本):上位机均可通过29999端口的以下指令获取该全局变量variable -get A9修改…
分享
手机扫码分享
复制链接
0
1523
4.
【论坛】如何查看UR机器人的URP文件
UR机器人在示教器编写的文件是URP。URP本身一个xml文件,并且进行了压缩如果想看到URP文件内部,只需要对该文件解压,并用记事本打开查看即可。可以对比CS机器人的task文件(本质也是xml,可以把后缀名改成.xml,方便编辑器高亮语法查看)。可以使用winmerge等软件,比较task和urp文件的异同并做参考。
分享
手机扫码分享
复制链接
0
1301
5.
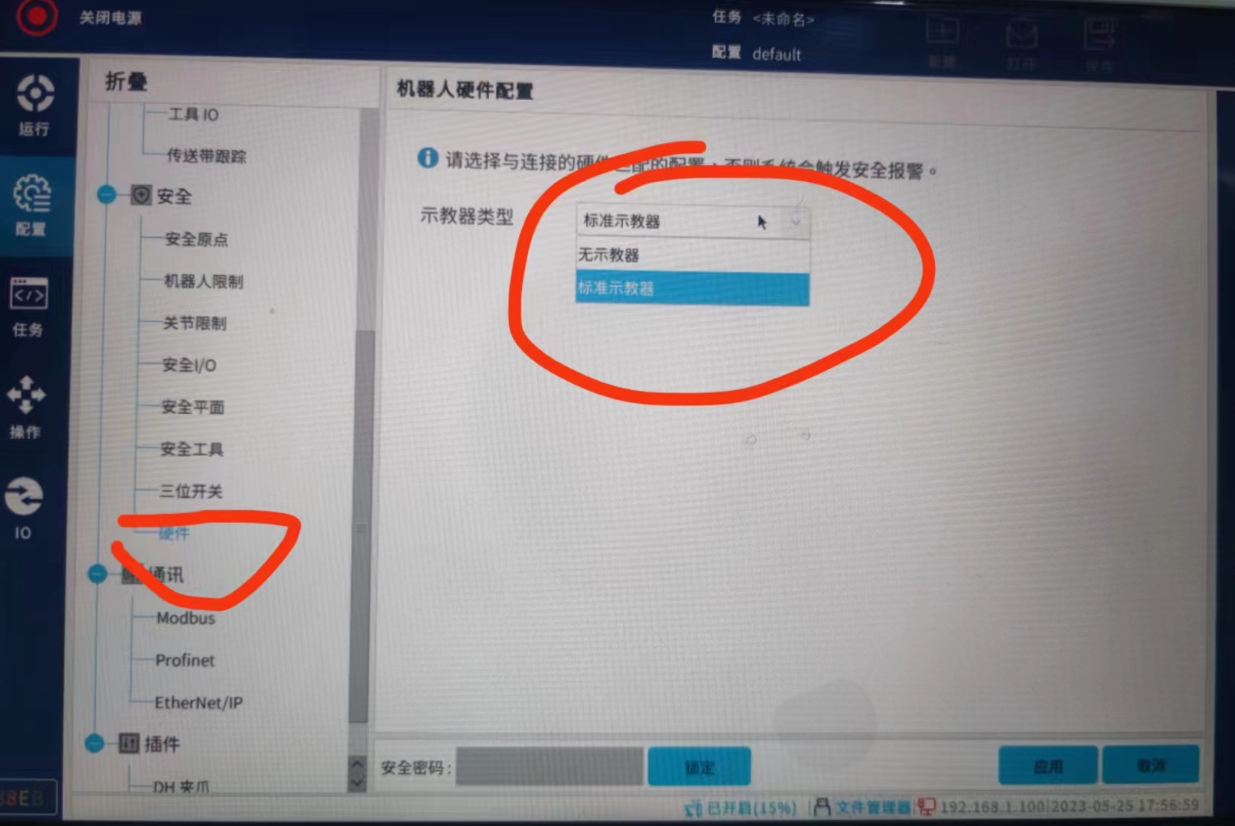
【论坛】CS拔除示教器设置
机器人软件升级到2.5及以上,在用户拔除示教器前,进入以下设置界面,设置示教器类型为: 无示教器设置完毕后即可拔出, 无需做其他硬件连接变动注:用户选择必须与当前真实情况一致,比如用户选择了无示教器,但实际情况却连接了示教器,此时会触发安全故障模式,并报警E9S3,提示用户需要当前设置不匹配。同样的如果用户选择了标准示教器,但此时却没有连接示教器,则会报警E9S1示教器断开连接。
分享
手机扫码分享
复制链接
0
1120
6.
【论坛】EC机器人合集
1. 常见使用问题 1. B站视频链接:https://bbs.elibot.cn/forum/detail/topic/130.html 2. 机器人打包程序:https://bbs.elibot.cn/forum/detail/topic/143.html 3. 关闭示教器提示声音:https://bbs.elibot.cn/forum/detail/topic/254.html 4. 通过U盘导入JBI和l…
分享
手机扫码分享
复制链接
0
12909
7.
【论坛】CS机器人末端与DH手抓modbus_rtu通讯
CS机器人末端与DH手抓modbus_rtu通讯1假设当前使用的DH抓手通讯速率如下,则在CS机器人的的工具IO设置界面,按照如下设置2可以使用如下代码,控制夹爪打开/关闭或者自定义行程。使用时,可以直接示教器界面插入脚本,代码行…
分享
手机扫码分享
复制链接
0
1662
8.
【论坛】CS机器人如何输入中文
CS机器人支持各种文字的显示。但CS机器人示教器的键盘只能输入英文,如何修改程序中的变量/文件夹/注释等为中文?可以把任务文件保存,然后直接修改.task文件中对应的关键字为中文,重新加载 任务文件.task即可
分享
手机扫码分享
复制链接
0
1102
9.
【论坛】快速修改全局变量和IO的注释
EC示教器上的全局变量(D,B,I,V,P)均可以人为修改注释(支持各类语言),数字IO,模拟量IO,M虚拟输入和输出也均支持 修改注释~可以在示教器直接修改,也可将相关文件下载本地,修改后上传。可以参考 https://bbs.elibot.cn/forum/deta…
分享
手机扫码分享
复制链接
0
1706
10.
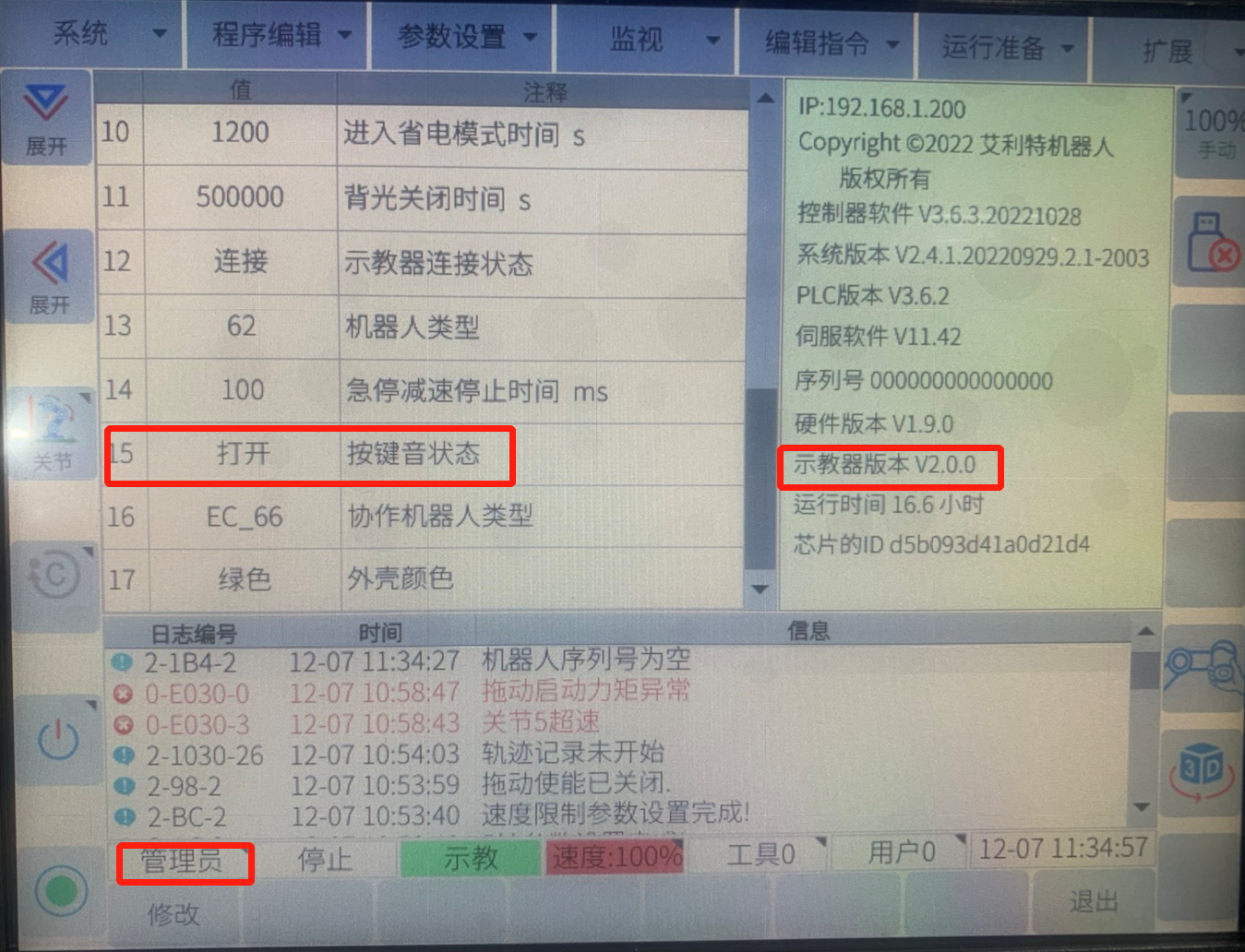
【论坛】EC怎么关闭示教器声音
1.示教器版本至少 v2.0.02.控制器版本至少 V3.2.23.管理员权限,密码3333334.在参数设置-控制器参数-按键音状态中调整
分享
手机扫码分享
复制链接
0
1913
11.
【论坛】CS机器人进入反向驱动
当机器人意外撞机等导致不能运动,需要使用机器人 反向驱动功能。具体进入方式如下:1,机器人进入如下界面,点击 “打开电源”按住示教器反面的 拖动使能开关,机器人即进入 “反向驱动”模式。此时可以人为掰动机器人关节
分享
手机扫码分享
复制链接
0
1219
12.
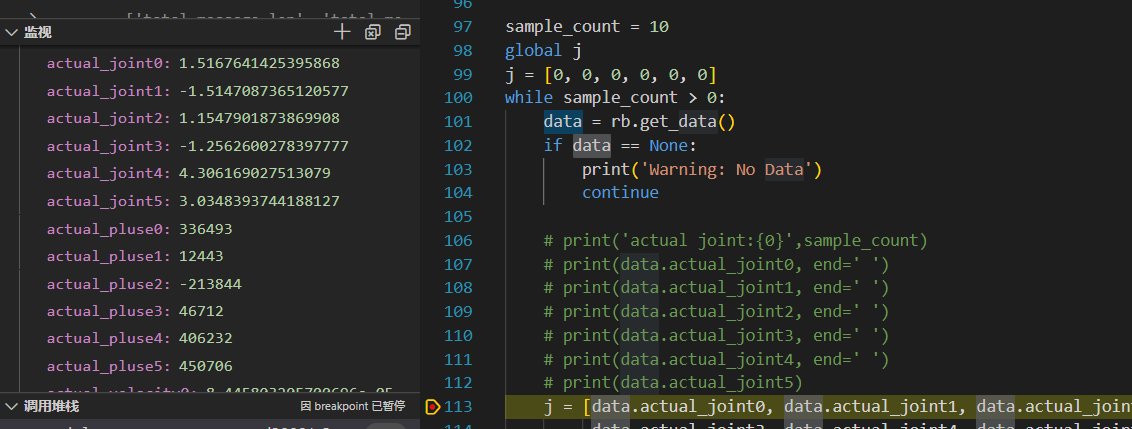
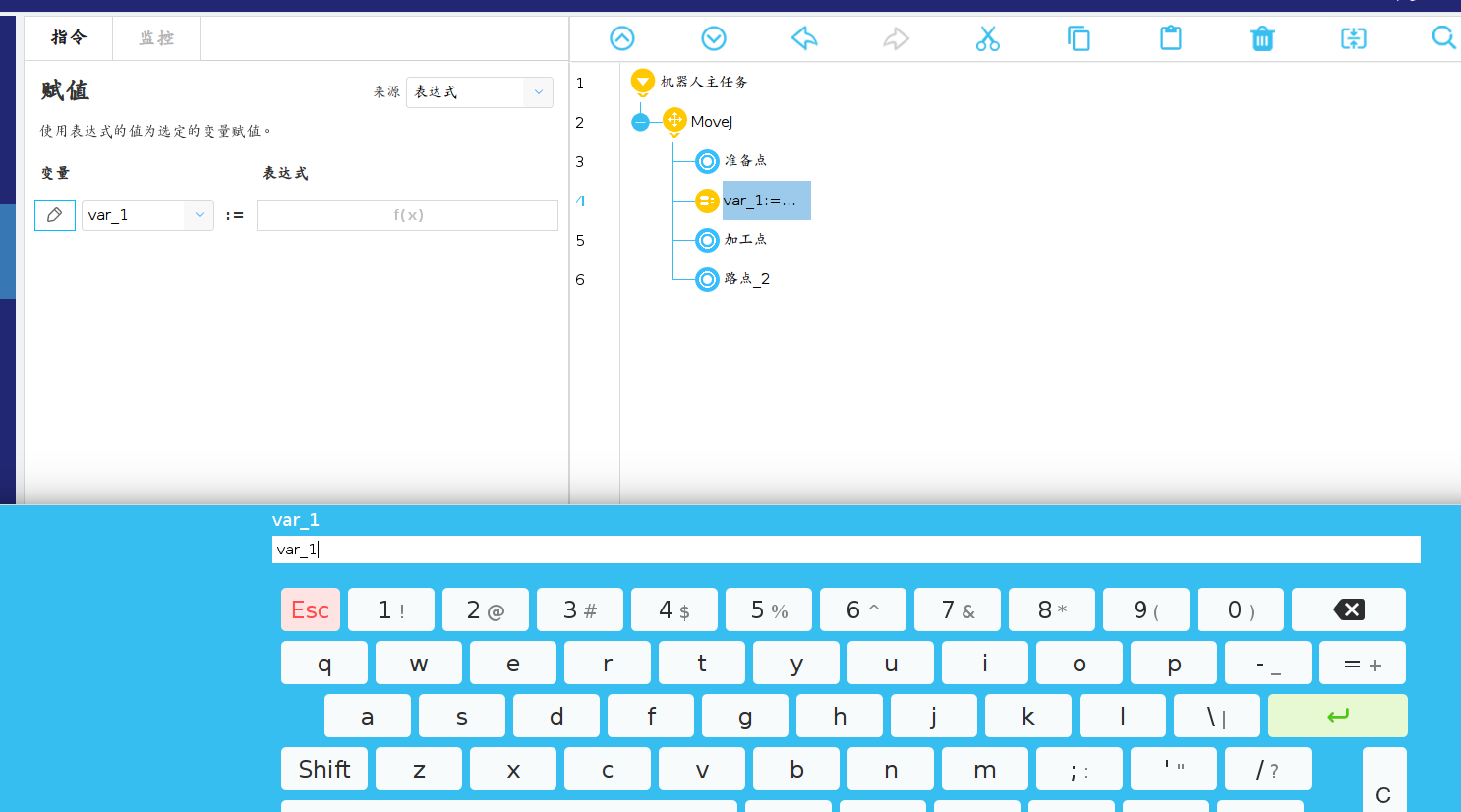
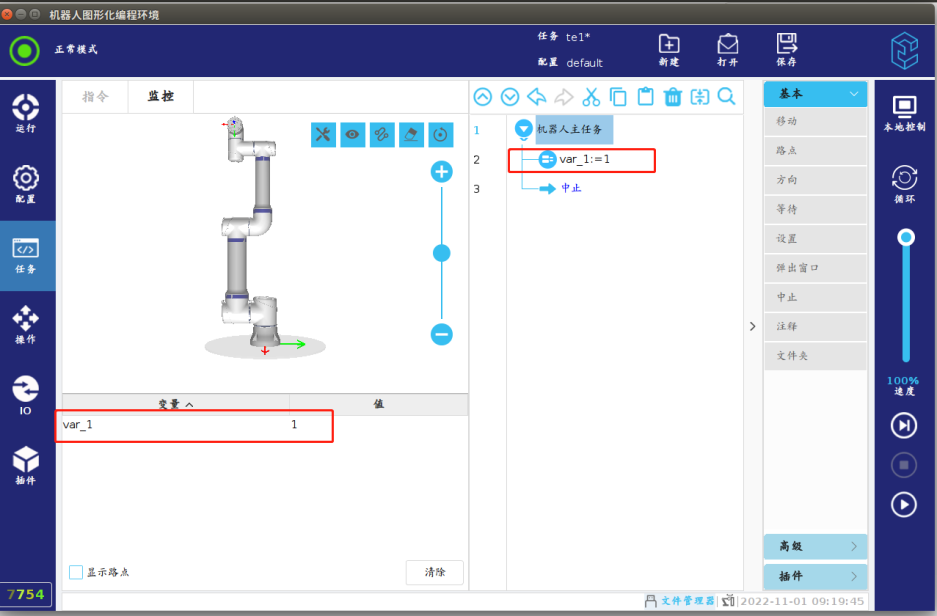
【论坛】CS示教器实时显示脚本中的变量数据
在CS机器人UI界面,可以创建变量,例如下图的var_1。运行时可以在 监控 画面 看到该变量的当前值。实质是机器人创建了global 变量var_1如果希望在示教器监控界面显示脚本中的变量数据,需要在脚本中创建global变量,并且后续对该变量赋值。此时运行程序,可以在示教器的监控界面看到该变量的当前值
分享
手机扫码分享
复制链接
0
1271
13.
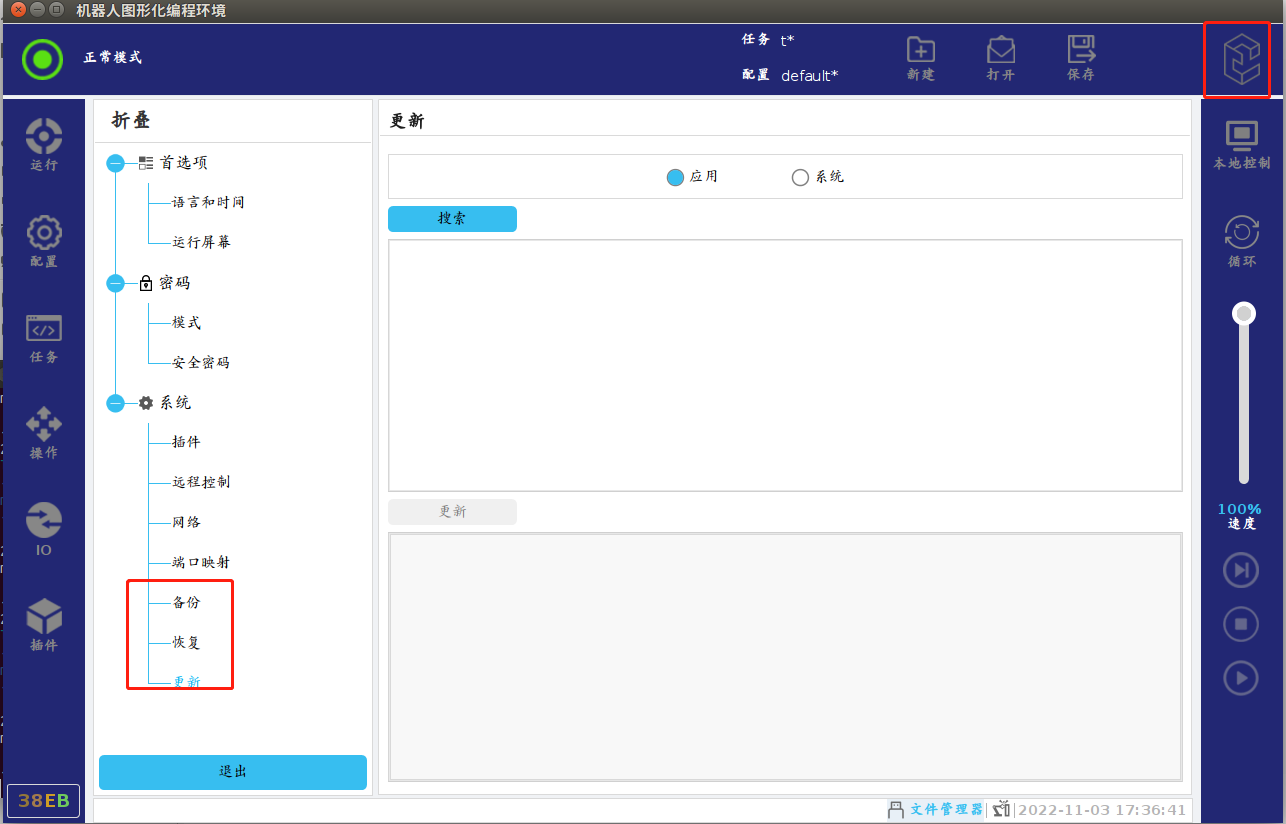
【论坛】机器人备份、恢复与升级系统
用户可以通过u盘对机器人进行备份、恢复与升级。将u盘插入机器人示教器的usb口,点击示教器右上角 艾利特 机器人图标,点击 设置,点击左下角的 备份、恢复与升级(升级包可以联系艾利特相关技术人员获取)
分享
手机扫码分享
复制链接
0
1336
14.
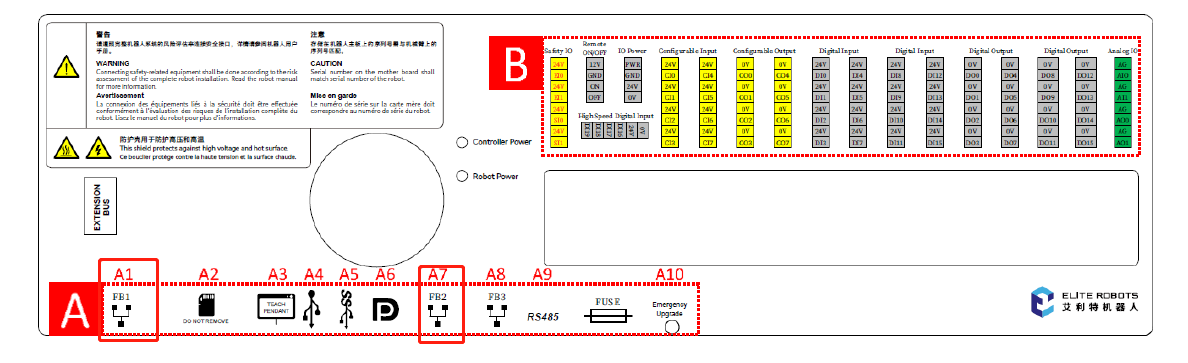
【论坛】如何设置CS机器人控制柜IP地址
CS机器人控制柜有3个网口,分别为FB1,FB2,和FB3。 FB3留待后期增加功能,目前不使用。PC可以连接FB1口,PC通过VNC远程操控示教器界面,或者通过FTP上传/下载机器人文件机器人运行脚本中的socket指令时,通过FB2口与外界通讯。机器人与PLC进行PROFINET通讯时,也连接FB2口。若机器人作为modbus master读写其他slave设备时,也通过FB2口进行。可以进入示教器,点击右上角 艾利特机器人图标,点击 设置,进入网口设置,对FB1和FB2网口进行IP地址设置
分享
手机扫码分享
复制链接
0
1728
15.
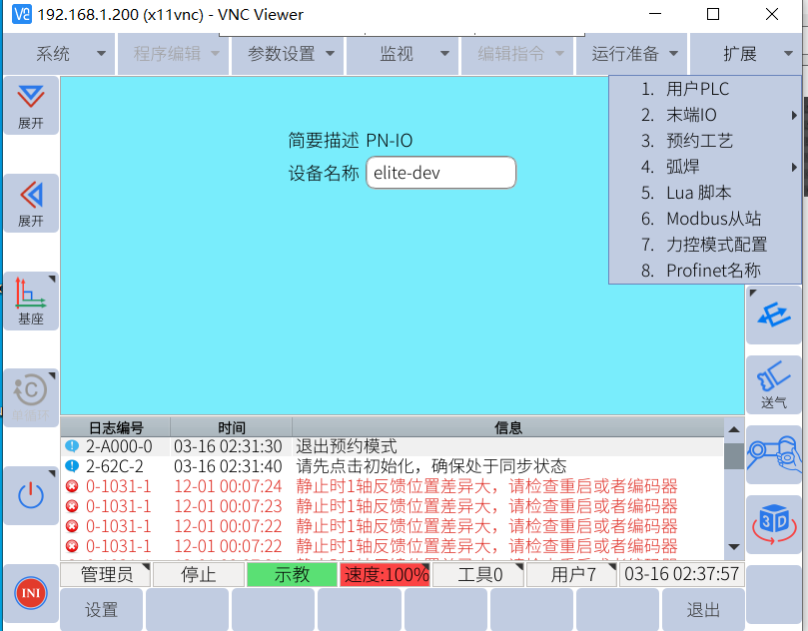
【论坛】EC3.7 示教器设置机器人PROFINET从站名字
EC机器人升级到3.7版本后,可以在示教器界面设置机器人作为PN从站的名字
分享
手机扫码分享
复制链接
0
1183
16.
【论坛】EC机器人支持手动模式自动对齐功能
机器人软件升级到v3.6后,点击示教器的3d试图按钮(如下图),并伺服上电,会出现“对齐基座”和“对齐用户”按钮。此时,点击对应按钮,机器人会将当前工具tcp的z方向自动垂直与基座xy平面或者用户坐标系的xy平面对齐后效果如下图。方便用户调试
分享
手机扫码分享
复制链接
0
1598
17.
【论坛】机器人安装位置计算及常用不同姿态安装数据
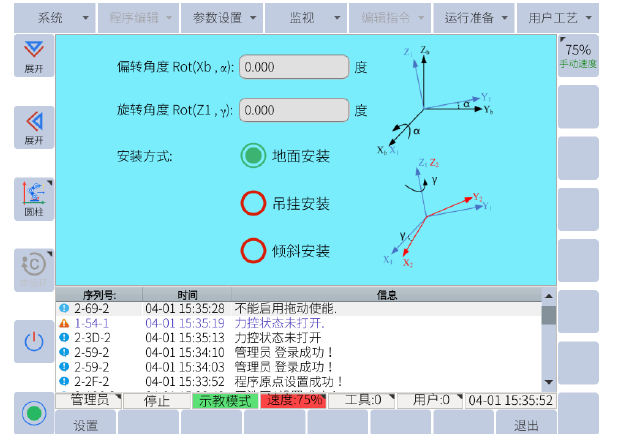
EC机器人支持不同姿态安装,包括侧装,倒装等。不同的安装方式,对机器人带来的重力影响不同。现场机器人在确定安装方式后,需要在示教器的 -- 运行准备-- 安装设置中输入以下参数。先根据右手定则绕此时机器人基坐标系X轴进行旋转,使得新产生坐标系W1的XY平面与安装面平行,旋转的角度即为偏转角Rot(Xb,α);再绕坐标系W1的Z轴进行旋转使旋转后的新产生的坐标系与安装姿态相符,旋转的角度即为旋转角度Rot(Z1,γ);关于常见不同姿态安装数据,可以参考下图输入。
分享
手机扫码分享
复制链接
0
2030
18.
【论坛】获取机器人实际DH参数
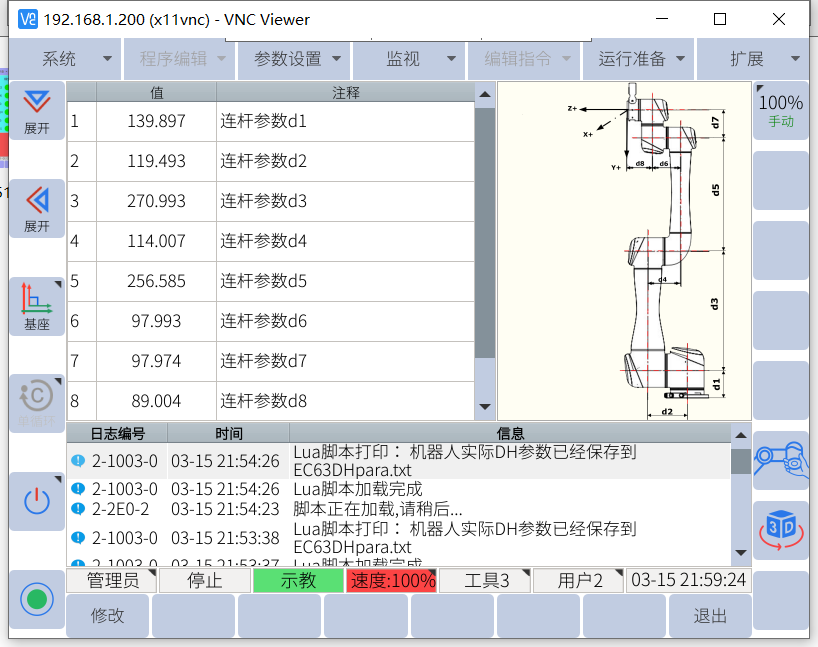
机器人DH参数可以通过示教器的“参数设置”-DH获取。机器人经过Leica激光仪标定,实际DH参数与理论值有差异,请使用机器人实际DH参数。下图为机器人实际连杆参数,注:以下连杆参数使用以下公式转化到对应标准DH参数的a alp…
分享
手机扫码分享
复制链接
0
1802
19.
【论坛】EC系列机器人反向驱动功能使用文档
软件版本本文档基于V3.2.2应用场景反向驱动模式主要是用于上电之后先手动移动机械臂至安全位置,例如开机超出软极限、不能自行松闸做编码器标定,或者是某些关节无法移动的场景。示教器界面使用方法用户可点击 ,再点…
分享
手机扫码分享
复制链接
0
2214
20.
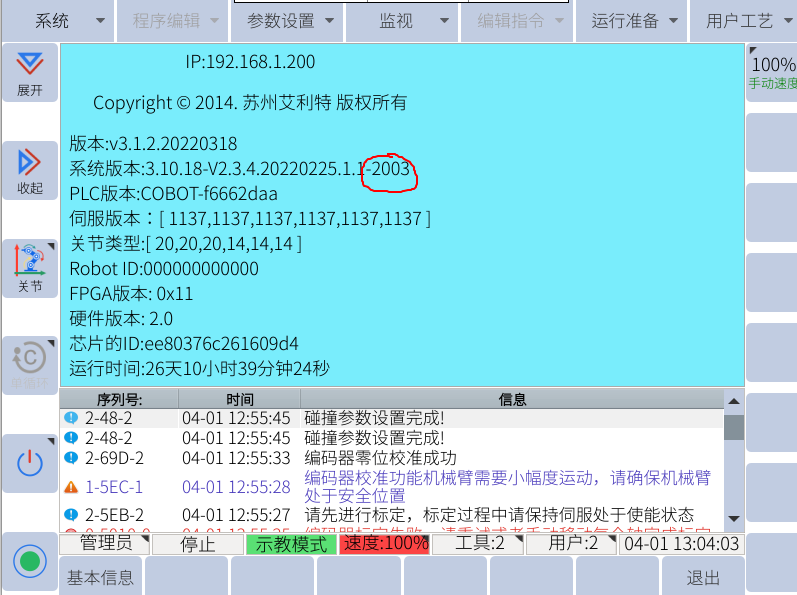
【论坛】查看机器人的IP和设置机器人的IP
请教大佬,怎么查看机器人的IP和设置机器人的IP,需要每一个步骤的详细示教器截图(中英两个版本都需要)
分享
手机扫码分享
复制链接
1
2307
21.
【论坛】网页示教器的配置以及Jog操作
软件版本要求软件配置需要在V3.0.0及以上,并且系统版本要求后缀为-2003版本软件配置打开vnc,并且配置开机启动 ---> 如何配置VNC设置网页登录密码硬件配置当软件配置完成后,已经可以在网页打开示教器的页面,打开浏览器输入192.168.1.200:6680,其中192.168.1.200需要更改为实际的机器人ip。如果需要拔除示教器,硬件上需要配置外部急停并且屏蔽示教器急停。详情见下图,或参见论坛
分享
手机扫码分享
复制链接
0
2293
22.
【论坛】SDK快速Q&A
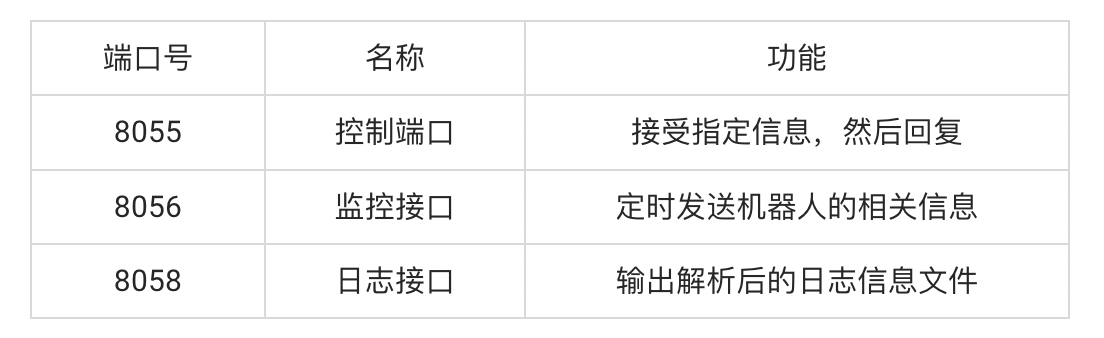
二次开发介绍Elite机器人的二次开发端口见下图:端口介绍8055Elite 8055端口是通过socket通讯向控制器发送指定格式的json字符串来实现的,其中机器人侧为服务器,上位机为客户端。通过8055端口,几乎示教器上的所有功能都可以实…
分享
手机扫码分享
复制链接
3
4983
23.
【论坛】VNC功能的使用
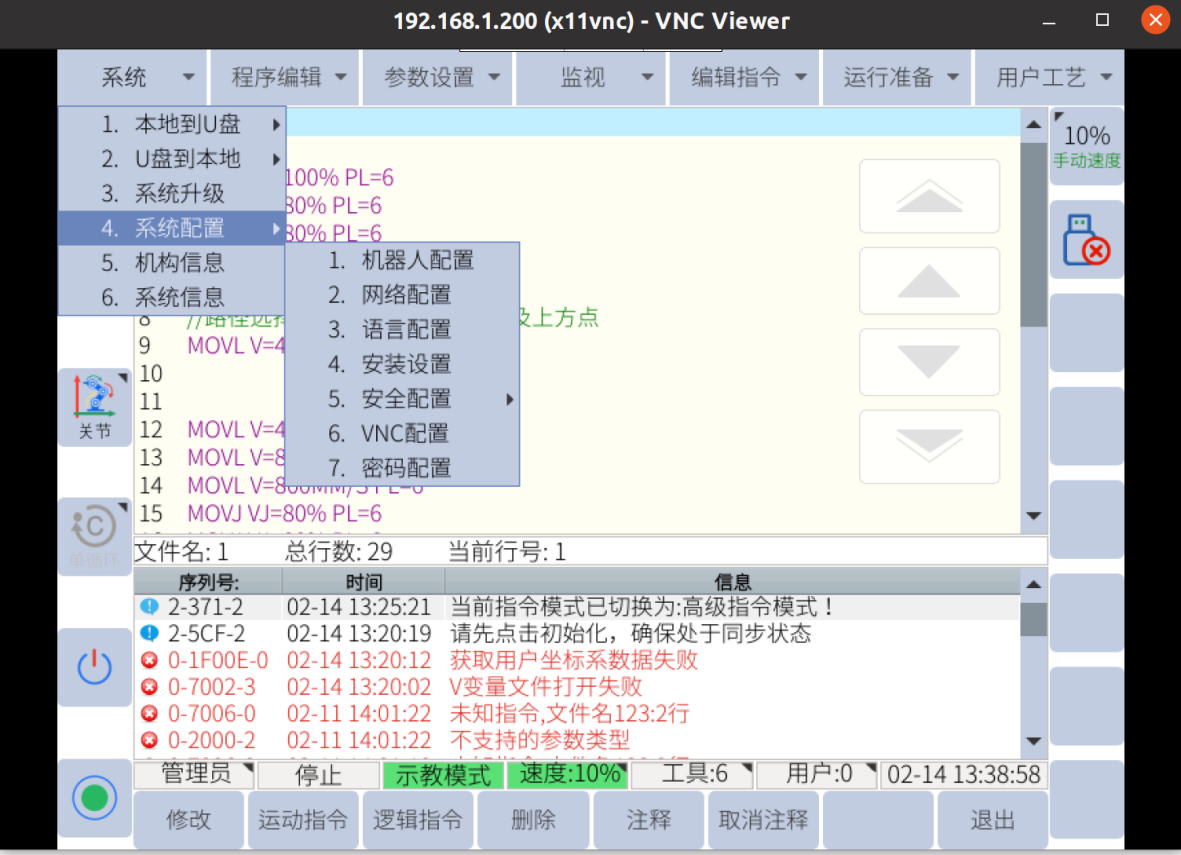
VNC是什么vnc是一款优秀的远程控制工具,Elite_EC系列机器人内部已经集成VNC服务器,用户可以通过网线链接即可在电脑上进行查看、控制机器人的示教器界面。机器人版本在2.15.2及以上版本支持VNC功能如何使用下载链接:VncViewer…
分享
手机扫码分享
复制链接
1
3751
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件